Riproponiamo un articolo di Franco Musiari su un tipo di alimentatori poco “inflazionato”… Tutti parlano di switching, questo è sugli alimentatori Low Drop Out
Gli alimentatori LDO sono la soluzione più semplice per ricavare una tensione regolata di valore inferiore a quella della sorgente di origine. Una valida alternativa alle soluzioni switching con un costo tipicamente inferiore, una minore complessità circuitale e, soprattutto, senza i problemi di emissione elettromagnetica.
Quando si cerca una soluzione per realizzare un alimentatore si trovano pagine e pagine di proposte per alimentatori switching ovvero unità che per generare la tensione di uscita necessitano di alcuni elementi in grado di operare come circuiti ‘chiusi o aperti’, di solito MOSFET portati alternativamente in conduzione o in interdizione, e di componenti passivi in grado di immagazzinare energia e poi di renderla.


Se si deve portare la tensione da generare a livelli superiori rispetto alla sorgente di energia disponibile un alimentatore switching è probabilmente, anche se non l’unica, la soluzione migliore. Se le potenze in gioco sono particolarmente sostenute – diciamo superiori alla decina di watt – e quindi l’efficienza è parametro fondamentale la soluzione switching è sicuramente da preferire. Ma quando la tensione da generare deve essere inferiore a quella disponibile di partenza vale la pena pensare ad un regolatore ‘Low Drop Out’ altrimenti identificato come ‘LDO’. Low drop out si traduce semplicemente in ‘bassa caduta di tensione’ che sta a significare che questo tipo di regolatori svolgono la loro funzione anche quando la caduta che devono generare per regolare l’uscita si riduce a qualche decina di millivolt.
E possono essere una valida alternativa alle soluzioni switching compensando la loro minore efficienza con un costo tipicamente inferiore, una minore complessità circuitale e soprattutto senza i problemi di emissione elettromagnetica tipici degli switching.
Cosa sono i regolatori LDO?
I regolatori LDO fanno parte della famiglia dei regolatori lineari la cui struttura tipica è riportata in figura 1. L’elemento di regolazione è l’unità che genera la caduta VDO tale che VIN – VDO = VOUT, sia pari alla tensione richiesta.
La tensione di ‘drop out’ è la minima tensione ai capi del regolatore che consenta ancora la regolazione dell’uscita. Un regolatore che ha una tensione di drop out minima di 1 V e che deve avere una tensione di uscita di 3,3 V richiede che la tensione di ingresso sia almeno 4,3 volt. Se l’ingresso scendesse al di sotto di questo valore l’unità non sarebbe più in grado di garantire la regolazione.

Nelle prime soluzioni l’elemento di regolazione era un transistore bipolare o, più tipicamente, una struttura di due transistori NPN in configurazione darlington che però ha l’inconveniente di una tensione collettore-emettitore (ovvero la VDO) che può facilmente arrivare ad essere nell’intorno di 1,7/2 volt. Una caduta – drop out – che difficilmente si potrebbe definire – low – bassa. Per questo motivo LDO di nuova generazione utilizzano come elemento di regolazione tipicamente un FET a canale N (o canale P) e la struttura semplificata diventa quella riportata in figura 2.
La tensione di ingresso è applicata all’elemento di regolazione, il FET a canale P o canale N, che opera nella sua regione lineare per far cadere la tensione fino al livello richiesto. La tensione di uscita viene rilevata da un amplificatore d’errore che la compara con una adeguata tensione di riferimento VREF.
L’amplificatore d’errore pilota il gate del FET al punto operativo che assicura che l’uscita sia alla tensione richiesta. Se la corrente di uscita o la tensione di ingresso dovessero cambiare l’amplificatore d’errore piloterebbe il gate del FET per mantenere costante la tensione di uscita. In condizioni di stabilità il FET si comporta come una semplice resistenza.

Per esempio, se supponessimo di operare con una VIN di 5V, una VOUT di 3,3V ed una corrente di carico di 500 mA il FET svolgerebbe la funzione di una resistenza di 3,4 Ω [(5 V – 3,3 V) / 0,5 A = 3,4 Ω].
Ma nelle applicazioni pratiche le condizioni operative non sono mai statiche quindi è necessario un feedback in grado di far modificare la resistenza del FET per mantenere l’uscita al livello desiderato.
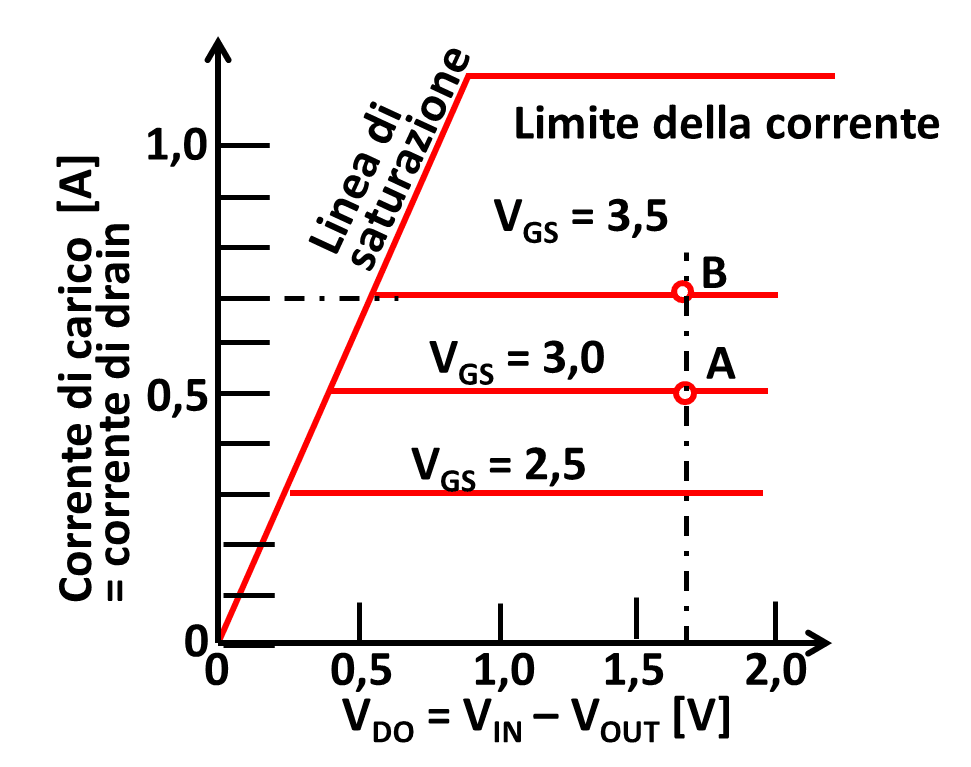
In figura 3 sono riportate le caratteristiche idealizzate tensione-corrente di un FET e l’area racchiusa tra la linea di saturazione e la massima corrente consentita rappresenta l’area di funzionamento perché l’LDO operi in modo appropriato mantenendo una uscita regolata.
In questo grafico il punto A rappresenta il punto operativo con VDO a 1,7 volt e la corrente di 500 mA visto poco sopra. Per soddisfare questa condizione il gate del FET deve essere pilotato a 3.5 V. Se la corrente del carico dovesse passare a 700 mA il FET passerebbe ad operare nel punto B con una tensione di pilotaggio del gate a 3.5 V.
Le ragioni per scegliere un regolatore LDO
Il mondo dei dispositivi che funzionano grazie ad una alimentazione a batteria si va facendo sempre più popolato e le dimensioni si fanno sempre più ridotte. In queste situazioni gli LDO giocano sicuramente un ruolo significativo. Gli LDO mostrano di essere uno strumento efficiente per ottenere consumi ridotti insieme ad un buon livello di efficienza. Il mercato offre diversi altri tipi di regolatori ma in molti casi gli LDO dimostrano di essere la soluzione più efficiente, meno costosa e più compatta. La mancanza di induttanze costose ed ingombranti consente di ottenere una dimensione totale più ridotta di un equivalente soluzione switching.
Come sceglierlo
Precisione (Accuracy): Non è improbabile avere componenti che richiedono una tolleranza delle alimentazioni particolarmente stringenti. Un esempio può venire dal mondo delle FPGA dove può succedere di avere la necessità di una alimentazione di 0,95V ±30mV. Una tolleranza che è solo leggermente superiore al ±3%. Ma le cose possono peggiorare se il margine di tolleranza deve essere, per varie ragioni, più cautelativo; come risultato può essere richiesta una tolleranza del ±2%.
Nei data sheet in cui viene riportata la precisione totale è indicata come ‘VOUT accuracy’ ed è espressa in punti percentuali. Per esempio nell’LDO LD39020 di ST è indicata una VOUT accuracy del ±3%.
In alcuni casi, quando la tensione VOUT non è fissa ma regolabile, non viene indicata l’accuratezza totale ma vengono indicate la ‘regolazione del carico’ – load regulation – e quella di ‘linea’ – line regulation. La prima fa riferimento all’abilità dell’LDO di mantenere la tensione di uscita al variare delle condizioni di carico e viene definita come ∆VOUT/∆IOUT. Mentre la regolazione di linea misura la capacità dell’alimentatore di mantenere la tensione di uscita al variare della tensione di ingresso e viene espressa come ∆VOUT/∆VIN.

Regolazione di linea e di carico, quando la tensione di uscita dell’LDO può essere regolabile vengono espresse in millivolt. Per esempio per l’LT3033 di Analog Device si hanno le seguenti specifiche su tutto il range di tensioni di ingresso e di temperatura: Line Regulation: 1.25 mV, Load Regulation: 2mV. Se per esempio la VOUT è impostata a 3,3 V la regolazione di linea comporta un errore del ± 0.04% = 0,00125/3,3×100 mentre la regolazione di carico comporta un errore del ±0.6% = 0.002/3.3×100.

Il partitore resistivo con cui viene impostata la tensione di uscita (vedi figura 4) potrebbe variare con la temperatura di ±100 ppm/°C e quindi contribuirebbe all’errore per un ±1.25% = 125°C × ±100 ppm/°C. Più un ±0.25% legato alla precisione dei resistori.
L’errore nel caso peggiore deve considerare che i singoli errori si muovano nello stesso verso e quindi l’errore totale è la somma di tutti i singoli errori.
maxERRTOT = ± (0.04% + 0.6% + 1.25% + 0.25%) = ±2,14%
Ma una assunzione più realistica considera che gli errori si sommino in modo casuale e quindi si calcola l’errore totale tipico come la radice quadrata della somma dei quadrati di tutti gli errori.
tipERRtot = ± √(0.042 + 0.62 + 1.252 + 0.252) = ±1,41%
Power Supply Rejection Ratio (PSRR):
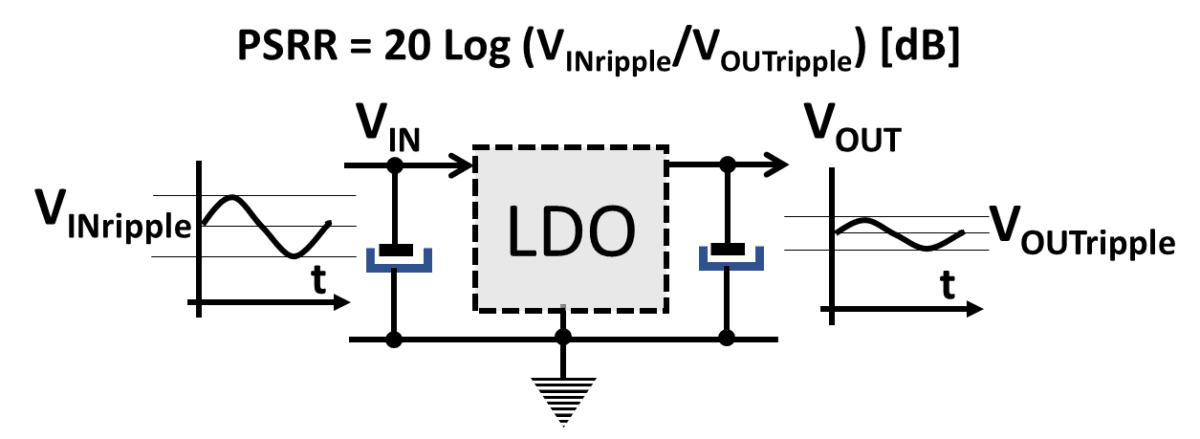
in parole semplici questo parametro è una misura di quanto bene l’LDO sia in grado di sopprimere segnali estranei indesiderati (rumore e ripple) ed evitare che questi influenzino la tensione di uscita. Questo parametro è calcolato (vedi figura 5) con la formula seguente ed è espresso in decibel (dB).
PSSR = 20 Log (VINripple / VOUTripple) [dB]
Dove VINripple e VOUTripplerappresentano l’ampiezza dei segnali indesiderati rispettivamente all’ingresso ed all’uscita del regolatore.
Questo parametro è strettamente legato alla frequenza ed ha un andamento che si può, in modo molto grossolano, delineare come in figura 6. L’andamento della curva può essere suddiviso in due regioni. La prima alla destra del picco minimo, definita come ‘LDO active area’, è molto vicina all’inverso del guadagno della catena ‘amplificatore d’errore e FET’. In questa regione è quindi l’LDO a determinare il fattore di rigetto dell’alimentatore. Nella seconda parte, alla destra del picco minimo a ridurre ripple e rumore contribuiscono soprattutto i parametri parassiti – induttanza delle interconnessioni del PCB e del condensatore di uscita che gioca un ruolo particolarmente significativo nella stabilità dell’uscita dell’LDO.
Il valore del PSRR è particolarmente importante nell’intervallo di frequenze che va dai 100 kHz a circa 1 MHz. Questo perché spesso LDO opera in cascata ad un alimentatore switching che presenta sicuramente sull’uscita un ripple la cui frequenza principale è la stessa che pilota le commutazioni dei suoi elementi attivi, frequenza che tipicamente cade nell’intervallo citato.

Corrente di quiescenza (quiescent current)
E’ un parametro fondamentale quando l’alimentatore deve essere utilizzato in un circuito alimentato da batterie dove i consumi devono essere ridotti ai minimi termini.
Rappresenta la corrente che viene assorbita dal dispositivo per poter svolgere le sue funzioni di controllo, ovvero per alimentare tutti i circuiti che lo compongono ed equivale alla differenza tra la corrente di ingresso e quella di uscita: IQ = IIN – IOUT. E’ anche detta corrente di terra (ground current) essendo la corrente che scorre nel pin di massa dell’LDO.
Il valore di questa corrente dipende dalla tecnologia con cui è realizzato il dispositivo, dalla sua configurazione circuitale, dal valore della tensione di ingresso, dalla temperatura operativa e dalla corrente di carico poiché all’aumentare di questa deve crescere il pilotaggio del FET, che funge da elemento di regolazione, al fine di ridurne la RDSon.
Per gli LDO ad alte prestazioni la IQ è tipicamente molto inferiore all1% della corrente di carico e nei dispositivi in tecnologia CMOS di ultima generazione può ridursi anche a pochi microampere.
La corrente di quiescenza non va confusa con la corrente di arresto o spegnimento – shutdown – che misura invece la corrente assorbita quando l’LDO è disabilitato. In questo caso l’LDO non può svolgere alcuna delle sue funzioni.
Le caratteristiche salienti di un regolatore lineare LDO si possono così riassumere:
- In grado di supportare correnti di carico da poche decine di milliampere ad una decina di ampere con eventuali uscite multiple.
- Ampia selezione di tensioni di ingresso (fino a 100/120 V)
- Caduta di tensione (drop out voltage) che può ridursi fino a 40 mV a pieno carico.
- Tensione di uscita particolarmente precisa (accuracy); tipicamente dello 0,4%.
- Coefficiente di rigetto del ripple (PSRR – Power Supply Rejection Ratio) anche migliore di 90 dB (tipicamente @1kHz).
- Corrente a riposo anche ridottissima: anche poche decine di µA.
- Vastissima scelta di package: da STSTAMP di 0.47 x 0.47 mm2 fino ai TO-263.