Con l’aggiunta dei capitoli su gli organi di commutazione, l’inverter ideale, il funzionamento ad onda quadra, il PWM siunsoidale e il filtraggio si completa l’approfondimento tecnico curato dall’ing. Franco Musiare per i lettori di Fare Elettronica.
Uno degli apparecchi elettronici che ha una posizione predominante nel mondo delle applicazioni di potenza, da quelle più contenute a quelle estremamente elevate è senza dubbio l’inverter che vede le applicazioni più estese nel pilotaggio di motori AC trifase.
Questo dispositivo ha tipicamente il compito di convertire l’energia fornita da una sorgente in corrente continua in una uscita, ai suoi morsetti, di grandezze alternate sinusoidali, con ampiezze e frequenze che possono essere opportunamente controllate. Generalmente nel gergo industriale si intende un dispositivo atto alla regolazione della velocità dei motori trifase.


Gli inverter trovano impiego in diversi settori che vanno dagli UPS (vedi figura 1) che, per qualche minuto, riescono a tenere alimentato il nostro PC in presenza di un blackout, ai sistemi di trasmissione in continua (HVDC – High Voltage DC). Ma uno dei settori che negli ultimi anni ha visto una crescita esponenziale del loro numero è il pilotaggio, ovvero l’alimentazione, dei motori elettrici.
Da quelli di potenza contenuta, come le applicazioni consumer (p.e. lavatrici, compressori di frigoriferi o impianti di condizionamento), a quelli di potenza estremamente elevata come i motori per la trazione ferroviaria. A questi mondi negli ultimi anni si è affiancato quello dell’auto che, grazie ad una spinta verso un mondo più “green”, vede l’auto elettrica nelle sue diverse versioni (mild, full e plug-in hybrid, e completamente elettrica) prospettarsi a breve come un grandissimo utilizzatore di questo dispositivo.
Sono classificati in due tipologie: la VSI (Voltage Source Inverter) o inverter a tensione impressa dove il parametro controllato è il valore della tensione e la CSI (Current Source Inverter) o inverter a corrente impressa dove, invece, la grandezza controllata è la corrente.
Gli Inverter a Tensione Impressa sono attualmente i più diffusi per tutto il range di potenze anche se il controllo della dinamica del motore è più complessa, ma questo ora non costituisce un problema data la aumentata potenza che MCU (Micro Controller Unit) e DSP (Digital Signal Processor) che possono quindi gestire algoritmi più complessi.
I motori asincroni ad induzione
I motori asincroni ad induzione (AC induction motor) sono di gran lunga i più diffusi e utilizzati, per la loro robustezza, affidabilità ed economicità, in moltissimi campi industriali e domestici e in un vastissimo intervallo di potenze: da poche decine di Watt fino a qualche megaWatt. In passato questi motori sono stati relegati ad applicazioni con scarsa dinamica (velocità strettamente legata alla frequenza di rete), ma oggi possono trarre vantaggio dalla facilità con cui l’elettronica può realizzare sistemi di pilotaggio (alimentazione) particolarmente sofisticati e a costi ragionevoli.

I motori trifase si distinguono per il numero di coppie di poli con cui sono stati realizzati. Nel caso di un motore a sei poli (caso a) di figura 2) il campo magnetico di statore compie una rotazione per ogni ciclo dell’onda sinusoidale. Nel caso di una frequenza di rete di 50 Hz il campo ruota 50 volte al secondo ovvero 3000 volte al minuto. Se si raddoppia il numero di poli la velocità di sincronismo si dimezza poiché il campo magnetico percorre solamente 180° nello spazio dei 360° dell’onda sinusoidale.
Quindi la velocità di rotazione del campo di statore può essere calcolata con la formula

NS = 120 f / p
dove NS è espressa in giri al minuto (rpm – round per minute), “f” è la frequenza della tensione di alimentazione e “p” rappresenta il numero di poli del motore. Questa viene anche chiamata velocità di sincronismo che è il limite superiore della velocità NR del rotore.
La velocità del rotore NR in condizioni nominali è sempre minore di un 3-6% di quella di sincronismo; è il fenomeno dello scorrimento (slip) che consente la produzione della coppia. Dalla formula che definisce lo scorrimento è possibile esprimere la velocità di rotazione effettiva del rotore:
s = (NS -NR) / NS
dove s è lo scorrimento, NS è la velocità di sincronismo e NR è la velocità reale alla quale ruota il rotore.
Schema di principio di un inverter
In figura 3 è riportato lo schema di principio di un inverter trifase per alimentare un motore ad induzione M. Nello schema si individuano due diversi blocchi funzionali: l’inverter vero e proprio e l’unità di controllo.
L’inverter è essenzialmente costituito da sei dispositivi di commutazione S1 – S6 (nella figura rappresentati come MOSFET). Questi sei interruttori sono collegati a due a due in configurazione a mezzo ponte e il punto comune di ognuno dei tre rami pilota una fase del motore. Comandando l’attivazione dello switch superiore di un ramo si mette in collegamento la fase relativa del motore al positivo dell’alimentazione. Ovviamente è indispensabile che non avvenga mai che i due switch di ogni ramo siano accesi contemporaneamente (pena un corto circuito).
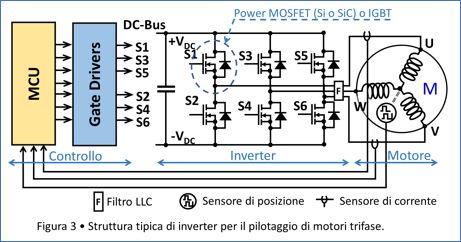
Vale la pena di sottolineare che ad ognuno dei MOSFET è collegato in antiparallelo un diodo che da una parte serve per consentire una via di richiusura delle correnti e consentire un ritorno dell’energia reattiva dal motore verso il bus di alimentazione.

Ma questi stessi diodi fungono invece da raddrizzatori quando il motore dovesse agire da generatore e traferire così energia dal motore verso il DC Link (per esempio in un veicolo elettrico durante la frenata il motore cambia la sua funzione e diventa generatore, consentendo così di recuperare energia).
L’ingresso all’inverter è una tensione continua (DC Link) normalmente ottenuta dalla rete elettrica di alimentazione tramite un raddrizzatore e un condensatore di livellamento di capacità opportuna che ha il compito di mantenere pressoché costante la tensione VDC ai suoi capi.
L’unità di controllo è rappresentata da un microcontrollore (MCU), nei sistemi più complessi potrebbe essere sostituito da un DSP, che partendo dalle informazioni ricevute dai sensori di corrente (su due fasi del motore) e da un sensore di posizione, determina le sequenze di accensione e spegnimento dei dispositivi di potenza controllando i segnali di pilotaggio dei gate da S1 a S6.
Gli organi di commutazione
Nello schema di figura 3 si è supposto che i dispositivi di commutazione, che sono gli organi di potenza dell’inverter, siano costituiti da MOSFET ma le tipologie di semiconduttori più adatti allo scopo sono diverse, ognuna adatta ad applicazioni nei diversi valori di tensione e corrente (ovvero potenza) che l’inverter deve controllare.
- Gli IGBT (Insulated Gate Bipolar Transistor) sono sicuramente i dispositivi più utilizzati in tutte le applicazioni di elevata potenza: tensioni che possono arrivare a 6,5 kV e correnti nell’ordine di 1/1,5 kA. L’unico aspetto negativo è che la velocità di commutazione non è elevatissima e si ferma tipicamente a circa 10/15kHz.
- I MOSFET al silicio sono la soluzione ideale per applicazioni di bassa e media potenza dove vengono preferiti agli IGBT per la possibilità di avere velocità di commutazione almeno dieci volte superiori a questi ultimi. Le potenze sostenibili da questi dispositivi raggiungono il kW ma le tensioni che possono sostenere sono nell’intorno dei 600 V e solo in alcuni casi si avvicinano al migliaio.
Oggi stanno diventando comuni nuove tecnologie che, al ridursi dei prezzi, potranno sostituirsi al silicio: l’arseniuro di Gallio – GaN – e il carburo di silicio – SiC. La caratteristica di entrambi è la velocità di commutazione decisamente più elevata (fino a qualche MHz), caratteristica che consente di ridurre la dimensione di induttanze e capacità di contorno. I MOSFET SiC hanno inoltre la possibilità di operare con tensioni che già oggi arrivano a 1700 V che li rendono concorrente temibili degli IGBT per potenza medio-alte.

- I GTO (Gate Turn-Off Thyristor) sono i soli dispositivi in grado di arrivare a gestire potenze con tensioni di 6 kV e correnti fino a 6 kA ma a frequenze di commutazione molto basse. Sono estremante costosi e il loro pilotaggio è estremamente complesso.
- Anche gli IGCT (Integrated Gate Commutated Thyristor), come i GTO, sono utilizzati per applicazioni di elevatissima potenza: 5,5 kV e 2,5 kA.
- Gli SCR (Silicon Controlled Rectifier) usati nei primi sistemi di controllo motori oggi vengono usati solo per applicazioni speciali di alta potenza con l’inconveniente che non hanno il controllo di spegnimento e sono molto lenti.
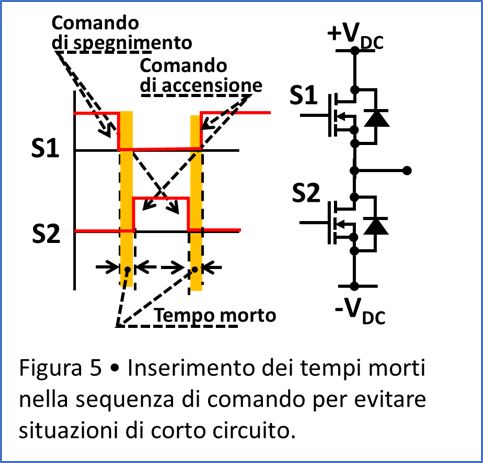
I tempi con cui questi dispositivi di commutazione reagiscono ai comandi non sono né sempre uguali né ideali (per esempio nello spegnimento la corrente impiega un certo tempo per ridursi a zero). Per essere certi di avviare l’accensione di uno prima che l’altro dispositivo sullo stesso ramo sia completamente spento si introduce un tempo di pausa (tempo morto o dead time), vedi figura 5. Questo ritardo nella conduzione di uno dei dispositivi di commutazione provoca però una certa distorsione nelle tensioni di uscita che, nei sistemi più sofisticati, deve essere compensato con algoritmi opportuni.
L’inverter ideale
La funzione di un inverter ideale è quella di fornire al motore una terna di tensioni alternate con andamento sinusoidale sfasate tra di loro di 120°. Questo lo si ottiene gestendo in modo opportuno i sei dispositivi di commutazione rappresentati, in figura 6, come interruttori. Il sistema di controllo deve pilotare questi sei interruttori secondo algoritmi che rendano le tensioni sul motore il più possibile vicine ad una onda sinusoidale.

Tabella 1 · Le diverse configurazioni di on/off di S1 – S6 e le relative tensioni di uscita.
Le possibili configurazioni di ogni ramo dell’inverter possono essere solo due on/off e off/on (la configurazione on/on non è permessa mentre quella off/off non genera tensioni di uscita). Essendo l’inverter costituito da tre rami le possibili combinazioni sono 2 x 2 x 2 = 8 e sono riportate in tabella 1. Per ognuno degli otto stati nella stessa tabella sono riportate le tensioni di fase (dette anche tensioni polari) VUO, VVO, e VWO (misurate verso il centro stella); e le tensioni concatenate VUW, VWV, e VVU.
Le descrizioni che seguono partono dalle seguenti considerazioni:
- la tensione del bus in continua rimane costante al variare del carico;
- i dispositivi di commutazione sono ideali ovvero non hanno cadute di tensione, non hanno ritardi di commutazione e quindi non si considera il tempo morto;
- La tensione in DC, per rendere più agevole la comprensione, è supposta essere divisa in due metà con il punto centrale collegato al neutro del motore (punto O, punto di collegamento delle tre fasi del motore)
Il controllo dell’inverter agisce sugli interruttori in modo da passare da uno stato all’altro ottenendo valori di tensione nei soli valori discreti: – Vdc, 0 e +Vdc. Pilotando opportunamente gli organi di commutazione si riescono comunque ad ottenere forme d’onda che hanno, sul motore, lo stesso effetto di trasferimento di energia di una alimentazione sinusoidale.
Esistono diverse tecniche di modulazione:
- Funzionamento ad onda quadra,
- PWM Sinusoidale,
- Commutazione con eliminazione programmata delle armoniche,
- Controllo vettoriale,
- Modulazione con regolazione della corrente.
Nel seguito verranno analizzati il funzionamento ad onda quadra e il PWM (Pulse Width Modulation) sinusoidale. Il primo perché è la tecnica utilizzata nella realizzazione dei primi inverter e poi poiché è utile per afferrare il meccanismo di determinazione delle tensioni il secondo perché è quello maggiormente utilizzato.
Funzionamento ad onda quadra
Nel funzionamento ad onda quadra (six step mode) ogni dispositivo di commutazione è acceso per π/2 (180°). Gli interruttori S1 e S4, che appartengono al mezzo ponte più a sinistra, controllano la tensione per la fase U e i loro segnali di controllo sono complementari così come lo sono quelli di S3-S6 e S5-S2. Vedi figura 6. I segnali di controllo degli interruttori S3 e S6, che controllano la tensione sulla fase W, sono ritardati di 2π/3 (120°) rispetto a quelli di S1 e S4 rispettivamente per la sequenza U-W-V. Similmente, per la stessa sequenza delle fasi, i segnali di controllo di S5 e S2 sono ritardati rispetto a S3-S6 sempre di 2π/3. Le tensioni ai terminali U, V e W sono, ovviamente, determinate dallo stato dei dispositivi di commutazione connessi a quel terminale ma in ogni caso possono assumere solo due valori: +Vdc/2 e -Vdc/2.
In figura 7, sulla destra, sono riportati i segnali di controllo – lo stato alto indica che l’interruttore è comandato in chiusura. Sempre in figura 7 ma sulla destra sono riportate le sei configurazioni che assumono i dispositivi di commutazione dell’inverter.


Le forme d’onda di figura 8, che sono riferite alla stessa base tempi di figura 7, mostrano l’andamento delle tensioni polari VUO, VWO e VVO riferite al centro stella “O”, punto di unione tra le tre fasi del motore. Questo centro stella è virtualmente collegato al punto di mezzo in cui è stata figurativamente suddivisa la Vdc del DC Link. I tre diagrammi inferiori rappresentano invece le tensioni concatenate VUW, VWV e VVU. Queste ultime sono il risultato di una differenza tra onde quadre sfasate, tra di loro di 120° e il risultato è una forma d’onda “quasi quadra” a tre livelli: +Vdc/2, 0 e -Vdc/2. Questa forma d’onda approssima grossolanamente una onda sinusoidale rappresentata, nel diagramma, dalla linea blu. E‘ ovviamente ricca di armoniche ma con una particolarità. Le onde quadre che sono alla sua origine hanno tutte le armoniche di ordina 1, 3, 5, 7, 9, ecc.
Ma, come già detto, le due forme d’onda di cui si esegue la differenza sono sfasate di 120° e quindi le armoniche con ordine multiplo di 3 di entrambe hanno la stessa fase e quindi nel processo di sottrazione si cancellano tra di loro. Le armoniche rimanenti sono quindi di ordine n con n = 6r +/- 1 (con r che rappresenta un intero positivo).
L’alimentazione di un motore con la forma d’onda così generata soffre di alcuni inconvenienti. Gli avvolgimenti vengono percorsi da correnti fortemente distorte e, di conseguenza, il campo rotante ha una ampiezza e una velocità che non sono costanti. Rispetto al regime sinusoidale si ha un incremento delle perdite sia nel circuito elettrico che magnetico della macchina. Di conseguenza il motore deve essere utilizzato al di sotto della sua potenza nominale, per impedire temperature eccessive, e la velocità minima non può scendere al di sotto di certi valori per mantenere le oscillazioni di velocità prodotte dalla coppia pulsante, percentualmente entro limiti ragionevoli.
PWM sinusoidale
Una possibile riduzione del contenuto armonico, la si può ottenere distribuendo in modo opportuno le inversioni delle tensioni di fase all’interno di ogni semiperiodo, ovvero modulando opportunamente la durata di ciascun impulso. Questa tecnica è comunemente nota come modulazione della larghezza degli impulsi o PWM (pulse width modulation).
Mediante diverse tecniche PWM è possibile far sì che le armoniche di maggiore ampiezza abbiano frequenze più alte di 3, 5, 7, … volte la fondamentale rendendo più facile il filtraggio sia dell’induttanza del motore che del filtro normalmente posto tra l’inverter e il motore.
Nel PWM sinusoidale il segnale di comando dei dispositivi di commutazione viene ricavato confrontando un segnale di controllo, onda modulante, con un’onda triangolare simmetrica che è la portante. La frequenza della portante deve essere almeno un ordine di grandezza superiore alla massima frequenza dell’onda modulante.
La frequenza (fp) dell’onda triangolare – la portante – stabilisce la frequenza di commutazione degli interruttori ed è di solito tenuta costante assieme alla sua ampiezza massima. La frequenza delle modulanti (fm) risulta pari alla frequenza fondamentale delle tensioni generate dall’inverter.
Negli inverter trifase a due livelli sono necessari tre segnali sinusoidali, uno per ogni fase pilotata, sfasati tra di loro di 120° elettrici. Il grafico nella parte superiore di figura 9 mostra, insieme alla portante triangolare, due soli segnali modulanti sinusoidali: uno relativo alla fase U e l’altro alla fase W. L’incontro tra la modulante fase U e la tensione della portante apre e chiude l’interruttore S1 generando la tensione di linea VUO sottostante. Lo stesso vale con la modulante fase W per la generazione del comando dell’interruttore S3 che genera la tensione di linea VWO. La differenza tra queste due fornisce la tensione concatenata VUW.
Ripetendo lo stesso meccanismo dopo aver aggiunto la modulante fase V (mancante in figura 9) con gli stessi meccanismi si può ottenere la tensione di linea UVO e da qui ottenere le due tensioni concatenate rimanenti VWV e VVU.
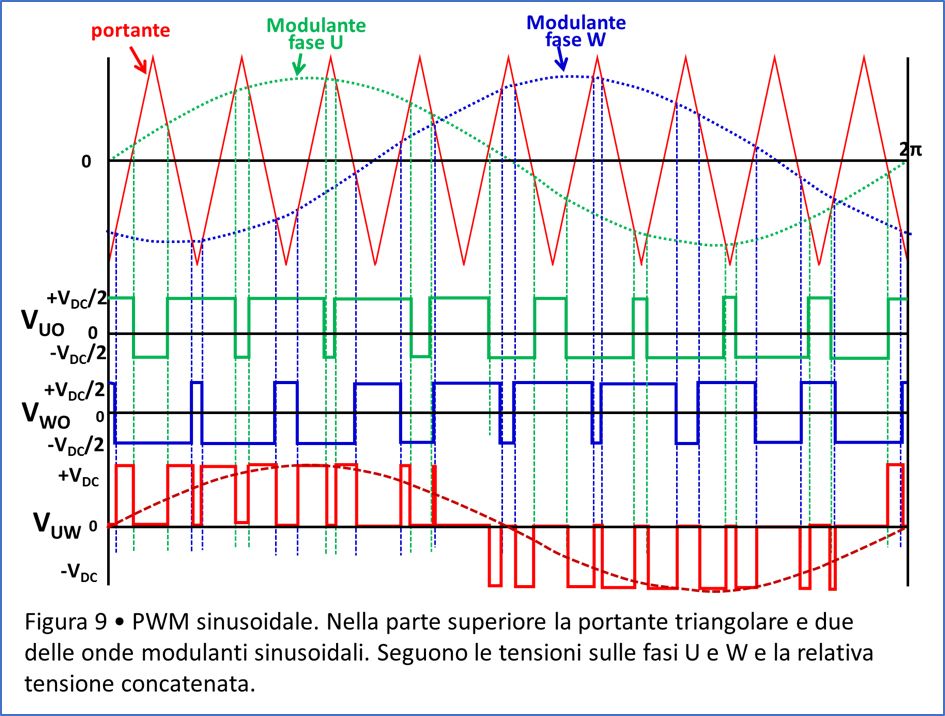
L’andamento di VUW, ottenuta dalla differenza tra la VUO e VWO – l’onda in basso di figura 9 – è tale che, nel valore efficace, si avvicina alla sinusoide tratteggiata della figura.
Questa tecnica soffre di un solo inconveniente soprattutto rispetto alla modulazione ad onda quadra. La frequenza della portante deve essere decisamente superiore alla frequenza di pilotaggio del motore, questo porta ad un elevato numero di inversioni di tensione con un conseguente aumento significativo delle perdite di commutazione dei dispositivi di potenza e rende l’elettronica di controllo molto più complessa. Quindi Svantaggio decisamente compensato da la frequenza della portante dovrà tenere conto della frequenza massima di lavoro dei dispositivi di commutazione e della capacità di calcolo del sistema di controllo.
Il filtraggio
Le tensioni all’uscita dell’inverter comprendono impulsi di ampiezza variabile con fronti di salita particolarmente ripidi (dV/dt elevati). L’induttanza degli avvolgimenti del motore agisce come filtro per le frequenze più elevate lasciando solo le componenti alle basse frequenze. Questa considerazione di base potrebbe anche funzionare ma soffre di alcuni inconvenienti:
- I rumori di modo comune e differenziali all’uscita dell’inverter producono interferenze elettromagnetiche (EMI) normalmente ben superiori ai limiti accettabili imposti dagli standard come l’EN 55011, Class A/Group 1 o l’EN 61800-3 Category C2.
- Gli elevati gradienti dV/dt durante le commutazioni dei dispositivi di potenza con possibili riflessioni legate alla lunghezza del cavo di collegamento al motore possono generare sovratensioni ai morsetti del motore che possono causare danni all’isolamento degli avvolgimenti del motore.
- Se la frequenza dello switching PWM sono nella fascia dell’udibile, sotto i 20 kHz, e l’uscita dell’inverter non è filtrata, le vibrazioni dei lamierini dello statore potrebbero causare un rumore fastidioso.
- Le armoniche di tensione che alimentano il motore elettrico generano le armoniche di corrente corrispondenti che causano perdite addizionali nel rame e nel ferro del motore.

La soluzione tecnica che permette di limitare queste problematiche prevede l’installazione di filtri LC tra l’inverter e il motore. La letteratura offre soluzioni e/o topologie che possono rispondere alle diverse necessità. La scelta più semplice è il semplice inserimento di una induttanza messa in serie come riportato in figura 10. Queste servono a ridurre il dV/dt degli impulsi di tensione limitandone gli effetti e possono essere sufficienti per collegamenti non particolarmente lunghi.
Una soluzione per cavi di lunghezza più considerevole è un filtro dV/dt come quello mostrato in figura 11. Questo è a tutti gli effetti un filtro passa basso, su ognuna delle fasi, che dovrebbe avere una frequenza di taglio superiore alla frequenza dell’inverter.
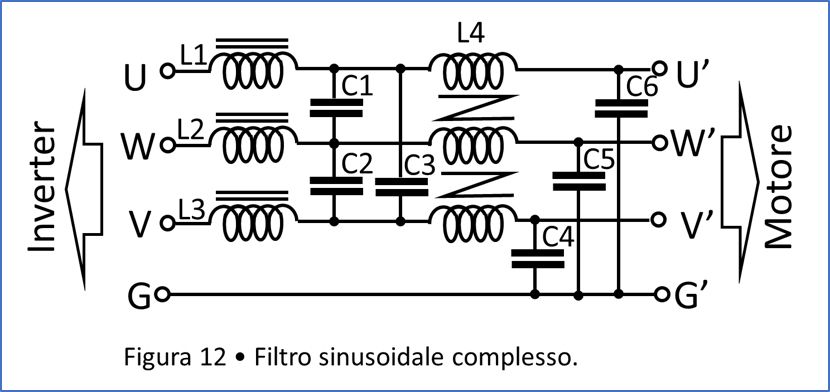
Una soluzione simile con prestazioni migliori è un filtro sinusoidale che ha la stessa struttura del filtro dV/dt ma con una frequenza di taglio molto minore, tra la frequenza AC di uscita e la frequenza del PWM dell’inverter. Questo migliora ulteriormente la caratteristica della forma d’onda di pilotaggio e consente un cavo di collegamento del motore fino a 100m e più ma richiede induttanze e condensatori di valore più elevato rendendo il filtro più costoso ed ingombrante.