COMSOL Multiphysics® è un ambiente software che consente di simulare numerose applicazioni tecnologiche. Tecnici e scienziati utilizzano questo software per comprendere, prevedere e ottimizzare progetti, dispositivi e processi in ogni ambito tecnologico, dall’industria alla ricerca. La modellazione multifisica fornisce risultati estremamente accurati. La sua filosofia è, infatti, quella di utilizzare e di sviluppare modelli che possano sostituire prove fisiche e prototipi. La progettazione e l’ottimizzazione dei processi e dei dispositivi avvengono in condizioni operative realistiche, come quelle descritte in questo articolo sulla modellazione dei sensori e degli attuatori.
Sensori e attuatori
I sensori e gli attuatori costituiscono le parti più importanti di numerosi macchinari, in quanto forniscono le informazioni per svolgere il lavoro e lo mettono in pratica. Essi sono abbondantemente utilizzati nella vita quotidiana in diverse apparecchiature o dispositivi meccanici o elettronici. La differenza principale tra sensore e attuatore (vedi figura 1) è che il sensore converte un’azione fisica in segnali elettrici, mentre l’attuatore è responsabile della conversione del segnale elettrico in lavoro meccanico.

I processi più importanti
Con il software COMSOL Multiphysics® è possibile progettare e, soprattutto, simulare qualsiasi tipologia di sensore o di attuatore. Si tratta di un programma estremamente professionale ed è necessario conoscere i fondamenti della Fisica (dalla meccanica all’elettromagnetismo) per poterlo utilizzare al meglio. Anche la parte operativa che riguarda la realizzazione del modello o dei componenti deve essere seguita con molta precisione, in quanto è necessario indicare molti parametri dei materiali, delle temperature e delle condizioni fisiche, chimiche ed elettriche. A ogni modo, queste sono le procedure da seguire, a grandi linee, per creare un componente base partendo da zero:

- creare la geometria dell’oggetto. E’ possibile importarla, eventualmente, da altri formati CAD vettoriali (step, dwg, dxf, stl, wml, wrl, ecc);
- aggiungere uno o più materiali al modello. Questa è una procedura obbligatoria poiché i comportamenti finali delle simulazioni dipendono proprio dalla scelta dei materiali. In questa fase è possibile modificare alcuni materiali o, addirittura, crearne dei nuovi. Ad esempio si può agire sulla conducibilità elettrica, sulla permeabilità relativa, sulla densità, sulla conducibilità termica, sul coefficiente di espansione termica, ecc.
- definire i comportamenti fisici del modello (campi magnetici, corrente elettrica, carica elettrostatica, temperatura, acustica, elettrochimica, ottica, fisica del plasma e dei semiconduttori, ecc.);
- creare una opportuna “mesh” per avere una corretta risoluzione del comportamento dell’oggetto.
- inserire uno Studio, ossia una tipologia di simulazione nel dominio stazionario, transitorio o altri;
- eseguire la simulazione;
- elaborare i risultati in post-processing mediante la produzione di tabelle, calcoli, grafici e diagrammi;
- aggiungere elementi di complessità crescente ai modelli.
Progettiamo una termocoppia
Si proceda, adesso, all’analisi e alla progettazione di una termocoppia, utilizzata quale sensore. E’ un dispositivo (a volte estremamente semplice) che serve a misurare la temperatura.
Si basa sul principio, scoperto da Thomas Johann Seebeck (da qui il nome dell’effetto prodotto), per cui in un circuito, formato da due materiali differenti in contatto tra loro, si crea una differenza di potenziale se sottoposti a variazione di temperatura. Se due fili di metalli diversi sono collegati tra loro ad una estremità ed essa viene riscaldata, s’instaura una corrente continua che scorre nel circuito.
La tensione dipende dalla temperatura e dalla natura dei due metalli. A ogni modo essa risulta estremamente bassa e problematica da gestire. Per scopi pratici si dovrebbe amplificare il segnale di uscita con un amplificatore operazionale a basso rumore e bassa deriva termica.
La termocoppia misura solo la differenza di temperatura tra la giunzione calda e gli estremi freddi. Si cerca, dunque, di mantenere stabile tale differenza, al contrario il potenziale elettrico si attenuerebbe per il riscaldamento di tutto il sistema.
Purtroppo una particolarità della termocoppia è quello di fornire dei risultati non lineari, ma tramite interventi circuitali o elaborazioni e condizionamenti matematici è possibile superare anche questo scoglio. Il modello qui proposto è molto generico e serve esclusivamente a fornire una indicazione sulla realizzazione. Misure, materiali e caratteristiche, poi, possono essere variati secondo le proprie esigenze. Il primo passo per la progettazione di una termocoppia è quello di definirne la geometria.
Allo scopo il programma contiene diverse opzioni e alternative. Si devono anche conoscere molti concetti della Fisica che, in toto, governa il software nella sua globalità. La frequentazione di corsi, tutorial e webinar sarebbe la scelta più sensata.
La nostra termocoppia (vedi in figura 2) è formata da tre elementi a forma di parallelepipedo (per semplicità realizzativa, ma la complessità degli oggetti può essere spinta al massimo). I due blocchi più grandi hanno la dimensione di 0,5 x 0,5 x 5 cm, mentre il terzo più piccolo e centrale misura 0,5 x 0,5 x 2 cm. Dato che si tratta di una termocoppia, è necessario l’utilizzo di due diversi materiali, in questo caso il Rame per il primo blocco a sinistra e l’Alluminio per gli altri due blocchi. Sebbene essi non siano elementi ottimali per la realizzazione di questa tipologia di sensori, il loro utilizzo rende perfettamente l’idea del funzionamento del dispositivo.

Queste alcune proprietà fisiche dei materiali:
- Rame
- conducibilità elettrica: 5.998e7[S/m]
- calore specifico a pressione costante: 385[J/(kg*K)]
- densità: 8700[kg/m^3]
- conducibilità termica: 400[W/(m*K)]
- coefficiente di Seebeck: 0.0000065[V/K]
- Alluminio
- calore specifico a pressione costante: 900[J/(kg*K)]
- conducibilità termica: 238[W/(m*K)]
- conducibilità elettrica: 3.774e7[S/m]
- densità: 2700[kg/m^3]
- coefficiente di Seebeck: 0.0000035[V/K]

Il coefficiente di Seebeck è uno dei più importanti parametri, in quanto determina l’effetto termoelettrico dei materiali. Il prossimo passo è quello di definire i comportamenti fisici del sistema.
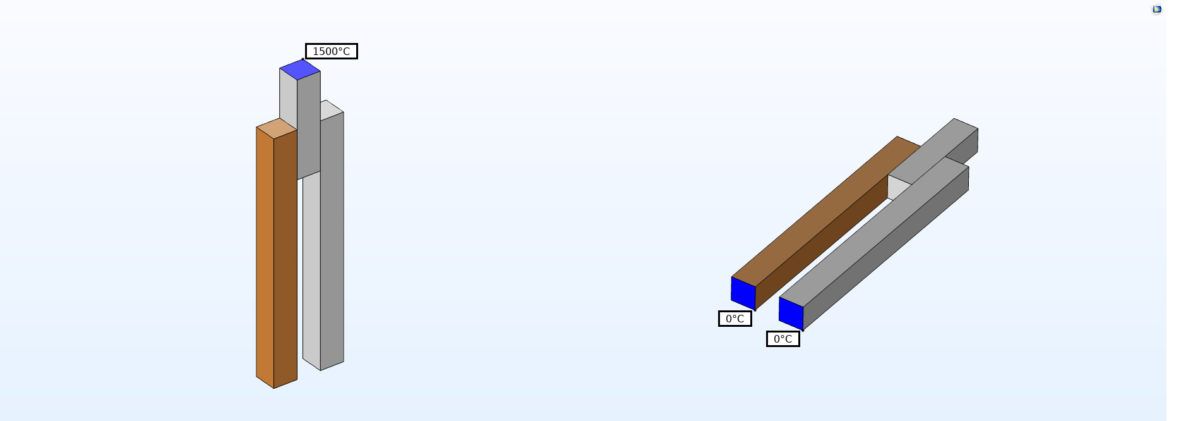
Vi sono opportune opzioni per raggiungere lo scopo. Occorre scegliere per questo l’effetto termoelettrico, che comprende la trasmissione del calore nei solidi e il calcolo delle correnti elettriche. Per quanto riguarda l’aspetto termico, occorre attribuire al modello due diverse temperature ai diversi nodi. La figura 3 mostra come sul nodo superiore sia stata attribuita una temperatura di 1500°C mentre su quelli inferiori una temperatura di 0°C.
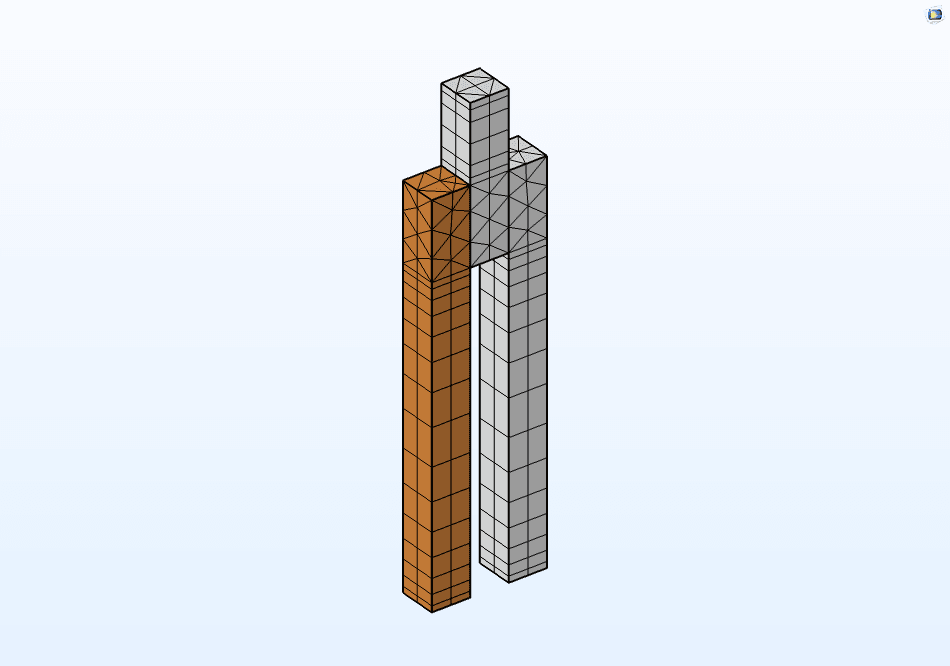
Dal punto di vista elettrico, ovviamente, non è applicato alcun valore di tensione o di corrente al modello. E’ indispensabile, adesso, creare un’opportuna “mesh”, ovvero una griglia che suddivida la geometria in parti più piccole e gestibili dal software per i calcoli di simulazione (vedi figura 4). Una griglia dovrebbe risultare la più fitta possibile facendo, ovviamente, i conti con la memoria RAM disponibile sul PC.
Finalmente si può creare uno “studio”, ossia scegliere una tipologia di simulazione che determina i risultati finali. Per l’esempio della termocoppia si è scelto uno studio stazionario. Si ricorda che le due tipologie di studio più rilevanti sono:
- stazionario;
- transitorio;
- analisi nel dominio delle frequenze.
Dopo aver definito e impostato lo studio, è possibile già effettuare una prima simulazione. Esaminiamo alcuni risultati rilevanti. Quello evidenziato in figura 5 mostra il comportamento termico della termocoppia, con un gradiente previsto in quanto si conoscono già i valori delle temperature agli estremi del modello.

Si noti come la colorazione bianca agli estremi superiori attesti una temperatura di 1500°C mentre agli estremi inferiori essa è di 0°C. Il potenziale elettrico è, invece, quello che più interessa ai fini pratici. La termocoppia, infatti, ha la funzione di fornire una corrente in dipendenza della temperatura.
La figura 6 mostra tale grafico. Sulla giunzione positiva, alla temperatura impostata, sono presenti circa 4 mV mentre su quella negativa 1.4 mV. La termocoppia fornisce, dunque, alle condizioni impostate una D.D.P. di 2.6 mV. Si ricorda che tale segnale dovrebbe essere opportunamente amplificato da dispositivi a basso rumore e a limitata deriva termica.

Progettiamo un interruttore
Il secondo esempio è quello del progetto di un interruttore. Il lavoro di stress per alte correnti è quello che più interessa.
Un interruttore di contatto viene utilizzato per decidere se una corrente elettrica deve attraversare una linea, dalla fonte di alimentazione al dispositivo elettrico.
La simulazione degli interruttori è un passo fondamentale nella progettazione delle applicazioni elettroniche. Il suo principio di funzionamento è semplice: due parti conduttive di metallo, con una differenza di tensione elettrica tra loro, vengono messe in contatto, permettendo alla corrente di scorrere.
Le superfici metalliche dei due componenti che si toccano si chiamano “contatti” e quando la connessione tra i due contatti è interrotta, la corrente non scorre. Il flusso di corrente tra i due contatti genera un aumento della temperatura dell’interruttore, dovuto all’effetto Joule. Andiamo a progettare, innanzitutto, la geometria dell’interruttore, visibile in figura 7.

L’interruttore è costituito, almeno nel modello esaminato in articolo, da diverse sezioni di differenti materiali. La sua misura è di 75 x 15 x 14 mm. I suoi componenti sono i seguenti:
- una base da 75 x 15 x 2 mm di materiale isolante (plastica acrilica);
- due isolatori da 22 x 15 x 2 mm di fibra di vetro;
- due supporti da 20 x 10 x 10 mm di Alluminio;
- due supporti da 10 x 5 x 5 mm di Rame;
- due contatti da 8 x 2 x 2 mm di Platino.
Ogni materiale è caratterizzato, come abbiamo visto nel precedente paragrafo, da proprietà ben precise.
Per quanto riguarda il comportamento fisico da prevedere, occorre selezionare la multifisica “riscaldamento per effetto Joule”. Questa configurazione prevede, in automatico, la gestione delle correnti elettriche e la trasmissione del calore nei solidi. La corrente che scorre attraverso l’interruttore è di 50 Ampère e sono stati implementati i terminali di terra e di corrente.
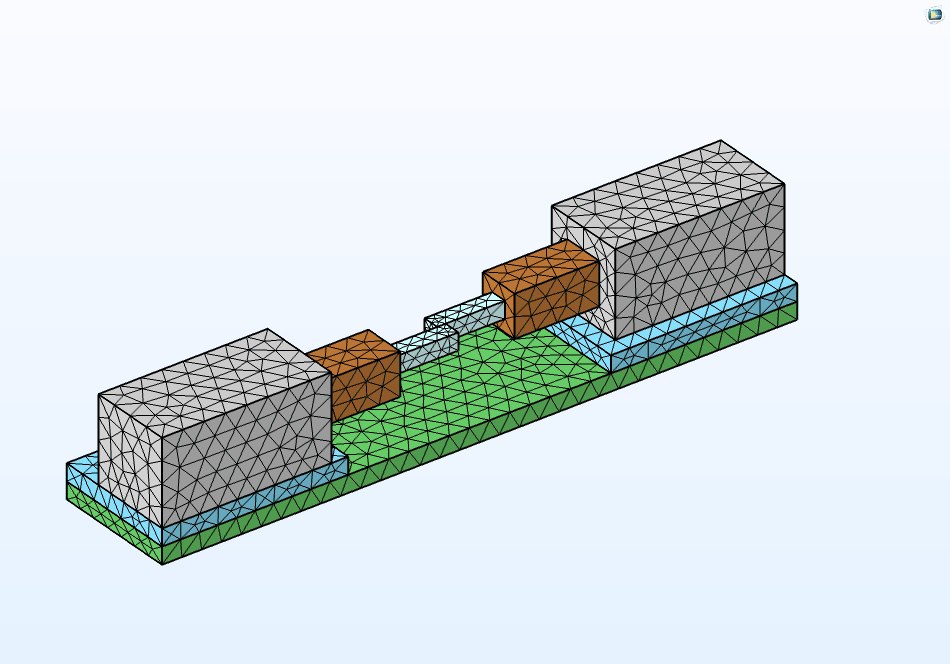
Ovviamente la simulazione riguarda l’interruttore in stato di chiusura, in quanto se fosse aperto non vi sarebbe alcun transito di elettroni. Anche in questo caso occorre creare una “mesh”, ovvero una griglia che suddivida la geometria in parti più piccole e gestibili dal software per i calcoli di simulazione. Le risorse computazionali richieste dal calcolo dipendono dalla densità della mesh (vedi figura 8).
Dopo le fasi preliminari (ovviamente semplificate al massimo per fini pratici) si può creare lo “studio”.
Per l’esempio dell’interruttore, al contrario della termocoppia, si è scelto uno studio transitorio. L’intervallo di tempo previsto è di 180 secondi.

E’, quindi, possibile effettuare la simulazione. Esaminiamo alcuni risultati rilevanti. La figura 9 mostra il comportamento termico dell’interruttore dopo un funzionamento (chiuso) di 180 secondi.

L’analisi del potenziale elettrico è interessante ed è mostrata in figura 10. Al nodo di terra è presente, ovviamente, una tensione di 0 V mentre al terminale opposto si misurano circa 27 mV.

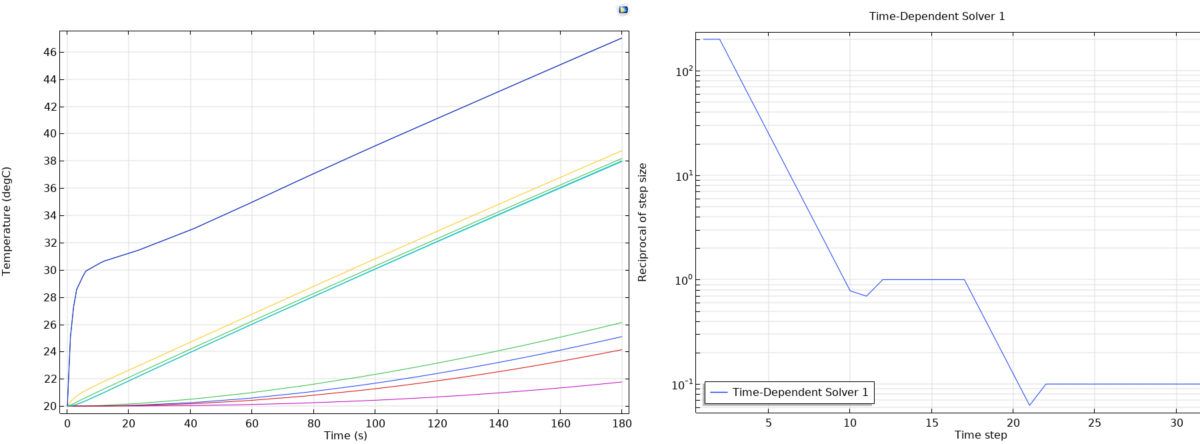
Anche l’analisi grafica del transitorio risulta importante e il grafico di cui alla figura 11 mostra la temperatura ai vari punti, dall’istante dell’attivazione dell’interruttore fino a 180 secondi.
Conclusioni
COMSOL Multiphysics è un programma straordinario ed eccezionalmente vasto. Con esso possono essere studiati sistemi dei vari settori dell’industria. Per chi studia Fisica e per chi progetta in qualsiasi ambito tecnico il software aiuta davvero nello sviluppo di sistemi statici e dinamici. Un’applicazione che non finirà di stupire, specialmente per gli addetti del settore.
Immagini realizzate con COMSOL Multiphysics® e gentilmente concesse da COMSOL®.
COMSOL Multiphysics è un marchio registrato di COMSOL AB.