

Il motore a combustione interna, presente da sempre nelle auto tradizionali come elemento principale di trazione, è destinato a scomparire per lasciare spazio a nuove soluzioni che vedono motore elettrico e batterie al centro della scena. Questo sarà possibile grazie allo sviluppo della tecnologia delle batterie che consente la realizzazione di sistemi in grado di fornire energia per una autonomia ragionevole a costi sempre più bassi. Inoltre il motore a combustione interna costituisce, senz’altro, una delle cause principali della generazione di CO2.
- Motore elettrico: cos’è e come funziona
- Motore e Powertrain: significato
- I tipi di motore elettrico
- Motori in corrente continua DC
- Motori in continua brushless (senza spazzole)
- Come funziona un motore brushless BLDC
- Tipologie di motori brushless BLDC
- Motori passo-passo
Motore elettrico: cos’è e come funziona
Insieme alle batterie, il motore elettrico costituisce il sistema che converte l’energia elettrica in energia meccanica per il movimento. Potremmo sicuramente affermare che rappresenta il cuore del veicolo o dell’auto elettrica.
Ci sono però diverse tipologie di motori elettrici che possono essere utilizzati allo scopo.
Come deve essere quindi il motore? Quali caratteristiche lo rendono migliore o più adatto alle applicazioni di e-mobilityIl motore elettrico deve
- essere in grado di sviluppare una coppia significativa partendo da velocità nulla;
- assicurare potenze di picco significative per avere prestazioni comparabili alle auto tradizionali;
- avere un sistema di pilotaggio e di controllo motore elettrico il più semplice possibile;
- essere leggero e compatto;
- costare relativamente poco;
- avere un’alta efficienza ai massimi livelli;
- fungere da generatore durante il rallentamento del veicolo.
Sintetizzando, il motore ideale per le applicazioni di trazione deve possedere ottime caratteristiche quali coppia elevata all’avviamento, una elevata densità di potenza e una buona efficienza energetica. Le diverse tipologie di motori che vedremo in questa carrellata offrono, in misura diversa, queste caratteristiche, basandosi su specifiche tecnologie.

Motore e Powertrain: significato
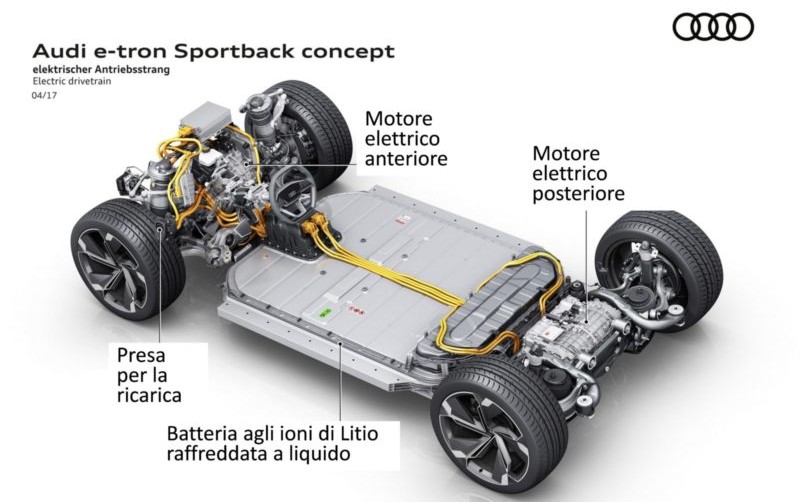
A monte, facciamo una breve precisazione. Cos’è il motore e cos’è il powertrain? Cosa significa powertrains? Nelle applicazioni automotive e transportation (Figura 1), un motore, per funzionare, ha bisogno di una serie di componenti che producono e trasferiscono la potenza al mezzo in cui si muove il veicolo stesso (la strada, ad esempio, ma anche l’aria o l’acqua). Si parla quindi di powertrain o, nella traduzione, di gruppo propulsore per indicare il motore, i suoi componenti (alimentatori, sistemi di raffreddamento, accensione, batteria ecc) e la trasmissione.
Di seguito, ci concentreremo sul motore soltanto, che come detto rappresenta il cuore pulsante della mobilità elettrica.
I tipi di motore elettrico
Tra le tipologie di motori elettrici troviamo:
- Motore a corrente continua (DC motor);
- Motore a corrente continua senza spazzole (DC o BLDC motor);
- Motore sincrono a magneti permanenti (Permanent Magnet Synchronous Motor o PMSM);
- Motore a induzione trifase – motore elettrico trifase;
- Motore a riluttanze commutate (Switched Reluctance Motors o SRM).
Motori in corrente continua DC
I motori in corrente continua (vedi figura 2) vanno citati in questa sequenza essendo stati i primi motori a essere ampiamente usati in applicazioni di trazione nella prima parte del secolo scorso. Offrivano, e offrono ancora, concreti aspetti positivi: coppia elevata all’avviamento, capacità di supportare aumenti repentini del carico, facile controllo della velocità, semplicità costruttiva e costi contenuti. Ma ha un grosso inconveniente: la necessità di contatti elettrici, le spazzole, su una parte rotante per rendere possibile la commutazione della polarità sugli avvolgimenti del rotore.
Per questo motivo vengono spesso citati come motori a spazzole o “brushed motor”. Questo aspetto li rende bisognosi di manutenzione costante, a causa del consumo delle spazzole normalmente realizzate in carbone, e la cosa li ha messi praticamente fuori mercato per queste tipologie di applicazione.

Motori in continua brushless (senza spazzole)
Sono chiamati “brushless” perché sono senza spazzole e per questo motivo non soffrono dell’inconveniente necessità di manutenzione di cui soffrono i motori a spazzole. Hanno caratteristiche simili a quelli in DC: un’ottima coppia all’avviamento, una elevata efficienza energetica, fino al 95/98%, e possono essere progettati per raggiungere una densità di potenza particolarmente elevata (kW/dm3) consentendo di avere, a parità di potenza sviluppata, dimensioni particolarmente compatte.
Per queste caratteristiche sono tra i tipi di motore preferiti nelle applicazioni, e-bike e due-ruote di media potenza, dove il fattore compattezza è fondamentale.

Nei motori a spazzole sono queste ultime che portano la corrente agli avvolgimenti posti sul rotore passando attraverso il commutatore che svolge la funzione di dirigerla in modo opportuno. Nei motori BLDC gli avvolgimenti non sono sul rotore ma sullo statore, la parte fissa, mentre è il rotore che contiene i magneti permanenti.
Poiché gli avvolgimenti sono fissi non è necessaria la combinazione spazzole-commutatore rotante.
Nei motori a spazzole la rotazione è ottenuta controllando il campo magnetico generato dagli avvolgimenti che compongono il rotore mentre il campo magnetico che viene generato dai magneti che compongono lo statore è fisso.
Per cambiare la velocità di rotazione basta cambiare la tensione ovvero la corrente negli avvolgimenti e, di conseguenza l’intensità del campo magnetico generato nel rotore.
Come funziona un motore brushless BLDC
Nei motori BLDC sono i magneti permanenti a muoversi e la rotazione è ottenuta facendo muovere il campo magnetico generato dagli avvolgimenti fissi dello statore.
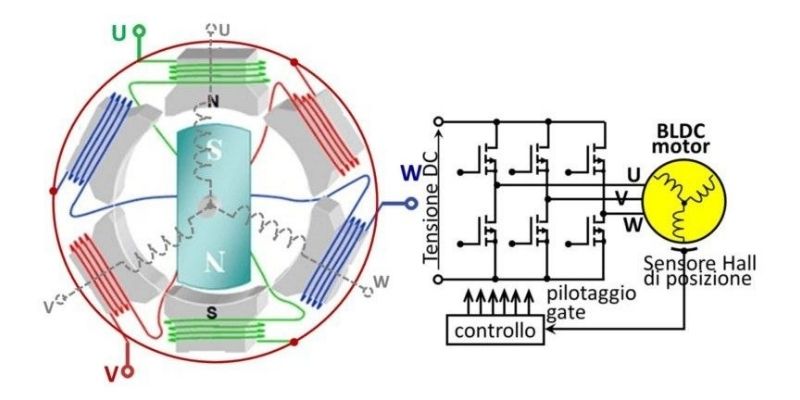
In Figura 3 è visualizzata la struttura tipica di un motore BLDC: i tre avvolgimenti sullo statore, verde, rosso e blu, hanno tipicamente un punto in comune e il pilotaggio avviene attraverso i terminali denominati U, V e W. Nella stessa figura è indicato il tipico circuito di pilotaggio in cui sono evidenziati i componenti, in questo caso, sono rappresentati dei transistori MOSFET, che fungono da interruttori.
Questi, da una parte collegano il terminale del BLDC al polo positivo della tensione DC mentre dall’altra parte lo collegano al polo negativo dell’alimentazione.Nella sequenza riportata il campo magnetico compie una rotazione completa trascinando la struttura a magneti permanenti del rotore a inseguirlo. E’ ovvio che ognuna delle fasi mostrata deve svilupparsi in una posizione ben precisa del rotore al fine di sviluppare il massimo della coppia. A questo scopo serve un segnale che indichi, al circuito di pilotaggio, quale sia la posizione del rotore al fine di attivare la fase corretta. Nello schema di Figura 3 viene indicato un sensore di Hall come unità preposta a questa funzione ma altre soluzioni sono parimenti possibili quali encoder ottici o unità chiamate “resolver”.
Tipologie di motori brushless BLDC
I motori BLDC, soprattutto nel mondo della trazione, si presentano in due forme: a rotore interno (in-runner) o a rotore esterno (out-runner). Nel primo caso, la realizzazione è esattamente simile alla forma delineata in Figura 3, quindi necessita di un sistema di trasmissione esterno per trasferire la potenza alla ruota e, di conseguenza, occupano più spazio all’interno del veicolo.

A questi si contrappone la versione a rotore esterno (out-runner) dove rotore e statore si scambiano di posizione. Lo statore, con gli avvolgimenti di eccitazione magnetica, sono interni mentre il rotore con i magneti permanenti ruota sulla parte esterna. Questo consente il montaggio della ruota direttamente sul rotore esterno risparmiando la meccanica necessaria per la trasmissione del moto.
Motori Passo-Passo
I motori stepper, o motori passo passo, fanno parte della famiglia dei motori in DC brushless e dominano il segmento della potenza medio piccola, dove è richiesta precisione e replicabilità degli spostamenti, sono inoltre di uso semplice e molto diffusi tra i maker.
I motori stepper, o motori passo passo, fanno parte della famiglia dei motori in DC brushless, ovvero senza le spazzole che svolgono la funzione di cambiare il verso della corrente nell’avvolgimento del rotore. In questi motori, invece, tutti gli avvolgimenti fanno parte dello statore mentre il rotore è realizzato assemblando opportunamente dei magneti permanenti.
Solo nel caso di motori a riluttanza variabile, poco diffusi, il rotore è realizzato in materiale magneticamente permeabile. Essendo motori brushless tutte le operazioni di commutazione devono essere svolte da un opportuno circuito di pilotaggio esterno.
Sono disponibili in un ampio ventaglio di risoluzione angolare: dal più grossolano che ruota di 90° per ogni passo fino ai motori a magneti permanenti ad alta risoluzione comunemente in grado di passi di 1,8°, ovvero una risoluzione di 200 passi per giro, e perfino di 0,72° (risoluzione di 500 passi).
Figura 1 rappresenta la struttura semplificata di un motore passo passo a due fasi con collegamento bipolare a 4 fili. Lo statore presenta quattro poli su cui sono collocati gli avvolgimenti che, quando percorsi da corrente, generano un campo magnetico che porta il magnete permanente del rotore ad allinearsi con esso

Spostando in sequenza l’energizzazione dei diversi avvolgimenti si può creare un campo magnetico rotante che trascina il rotore. Da questa struttura è derivato il simbolo del motore passo passo che vediamo nei grafici di figura 2: un cerchio che rappresenta il rotore e due induttenze perpendicolari tra loro a rappresentare gli avvolgimenti che, effettivamente nella idealizzazione di figura 1, sono ortogonali tra loro.
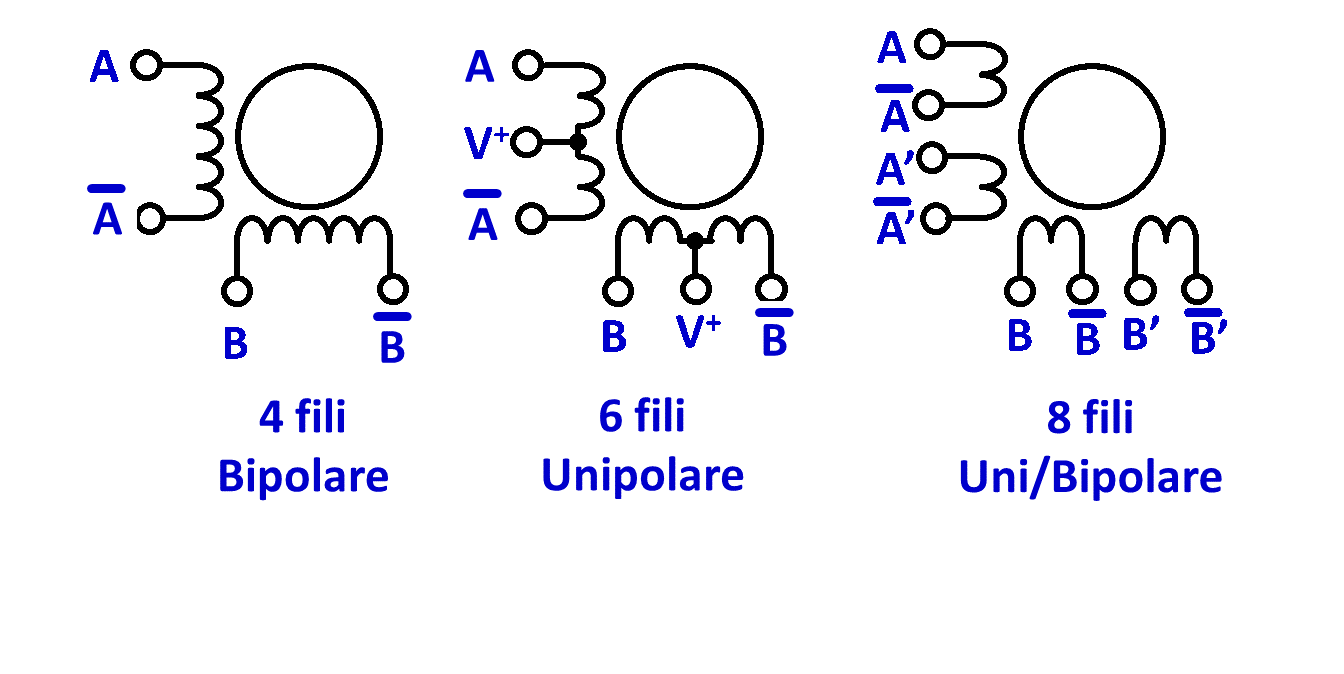
In figura 2 sono invece rappresentati i metodi più comuni di collegare i diversi avvolgimenti verso l’esterno. Il “4 fili” è definito bipolare poiché, per poter cambiare la direzione del campo magnetico, è necessario pilotare gli avvolgimenti invertendone la polarità applicata.
In figura 3A è delineata la struttura di un circuito di pilotaggio per questo tipo di connessione. La configurazione a ponte dei quattro MOSFET della parte finale del driver del motore consente, con una struttura opportuna del driver, di invertire la polarità del pilotaggio. Quando T1 e T4 sono in conduzione la corrente da V+, seguendo il percorso tracciato in rosso, percorre l’avvolgimento in un verso. Se T1 e T4 si interdicono e passano in conduzione T3 e T2 la corrente, seguendo il percorso tracciato in verde, percorre l’avvolgimento nella direzione opposta alla precedente.
Nella configurazione a “6 fili”, la più diffusa, il punto di connessione tra le due metà dell’avvolgimento che stanno sulla coppia di poli contrapposti, è resa disponibile ed indicata in figura 2 con V+. In questo caso l’inversione del campo magnetico la si ottiene collegando alternativamente a ground l’uno o l’altro degli estremi dell’avvolgimento. In figura 6B si vede come la struttura di pilotaggio sia meno complessa ma solamente nel caso di realizzazione a componenti discreti. La maggior parte dei driver integrati offrono già come stadio di uscita la configurazione a ponte delineata in figura 6A.
Va notato inoltre che il numero di spire che viene percorso dalla corrente è, nel caso di configurazione unipolare, la metà rispetto alla configurazione bipolare. L’intensità della forza di attrazione sul rotore è ovviamente proporzionale al valore del campo magnetico generato. Quest’ultimo è proporzionale oltre che alla corrente anche al numero di spire che compongono l’avvolgimento. Ne consegue che indicativamente la coppia sviluppata dai motori unipolari è significativamente inferiore di quella generata da un motore bipolare dimensionalmente equiparabile.
La versione a “8 fili” è quella che consente la massima flessibilità: è possibile ottenere una configurazione bipolare con i due semiavvolgimenti in serie oppure in parallelo o avere una soluzione unipolare.

Metodi di pilotaggio
Sono quattro i diversi modi possibili per pilotare gli avvolgimenti del motore:
- 1 fase ON (o wave drive),
- 2 fasi ON (o passo intero),
- mezzo passo (o fasi 1 & 2 ON),
- Micro-passo (o microstep).
“1 fase ON” (o Wave Drive)
Negli schemi che seguono (vedi figura 4) viene usata, per rendere più comprensibile la teoria di funzionamento, la struttura semplificata di un motore passo passo a due fasi. Il rotore viene indicato come un magnete a due poli (N indica il polo nord). Nello statore sono mostrati 4 poli magnetici che sono colorati alternativamente in blu ad indicare che l’avvolgimento relativo è pilotato per generare una magnetizzazione che rivolge il lato sud magnetico verso il rotore (in modo da attrarre il nord magnetico del rotore).

In questo tipo di pilotaggio viene attivata, in sequenza, una sola fase per volta. Quando è energizzata la fase A il rotore è portato ad allinearsi con questa. Spenta la fase A si attiva la fase B ed il rotore esegue, come mostra la figura 4 nel passaggio al passo 2, una rotazione di 90°. Sono quindi necessari 4 passi per compiere un giro completo. Questo equivarrebbe ad una rotazione di 1,8° nel caso di un motore passo passo con una risoluzione di 200 passi/giro (1.8 = (360°/50)/4).
“2 fasi ON” (o a passo intero, full step)
Si hanno sempre due fasi (adiacenti) attive come mostrato in figura 5.

In presenza di due fasi attive contemporaneamente si ha che il rotore è soggetto a due forze di attrazione. Nel caso di figura X, una forza è alle ore 12 mentre la seconda, della stessa intensità, è in direzione ortogonale alla prima. La somma di questi due vettori genera una risultante a 45° con un valore Ö2 =1.41 volte il campo magnetico generato da una singola fase. Anche con questo pilotaggio l’angolo di passo è di 90°, come nel caso “1 fase ON”, ma con una coppia superiore del 41%. Questo però comporta anche una potenza dissipata doppia, essendo i due avvolgimenti attivati contemporaneamente. Questo può causare un surriscaldamento del motore se non opportunamente utilizzato.
Mezzo passo (o fasi 1-2 ON, Half Step)
In questo caso si combinano i due metodi precedenti (vedi figura Y) attivando in sequenza prima una fase singolarmente e poi due fasi contemporaneamente. In questo caso ad ogni passo corrisponde una rotazione di 45°, la metà del passo dei due casi precedenti (da qui il nome “mezzo passo”). Sono quindi necessari otto passi per completare un rotazione.

Microstepping
Dal pilotaggio a mezzo passo si può cogliere un suggerimento per realizzare un pilotaggio con una risoluzione angolare ancora più ampia, ovvero avere passi di valore più contenuto. Se pensiamo di controllare la corrente, e quindi l’intensità del campo magnetico, nei due avvolgimenti attivi possiamo fare in modo che il vettore risultante dei due campi magnetici sia posizionato ad un particolare angolo.
Quando la fase A è al Massimo della potenza e la fase B è a zero il rotore si allinea con la fase A. Al diminuire della corrente nella fase A ed al contemporaneo aumento di quella nella fase B il rotore sposterà il suo posizionamento muovendosi vero la fase B fino ad allinearvisi quando raggiunge il massimo della corrente mentre la fase A ha raggiunto lo zero.
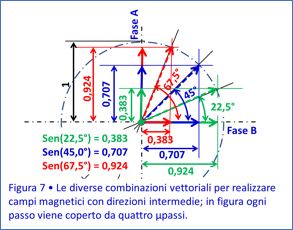
In figura 7, con l’aiuto di un poco di trigonometria, viene analizzato il caso della suddivisione di ogni singolo passo di 90° in 4 µpassi di 22,5°. Il vettore tratteggiato in rosso, che rappresenta, rispetto alla posizione verticale, uno spostamento di 22,5°, si otterrebbe combinando vettorialmente i due flussi magnetici delle due fasi ortogonali tra loro, la prima con un valore del 92,4% del suo massimo, il secondo del 38,3%.
Figura 8 traduce quanto detto nell’andamento delle correnti delle due fasi del motore affinché la risoluzione venga portata da 4 passi/giro a 16 passi/giro, ovvero migliorata di un fattore quattro.
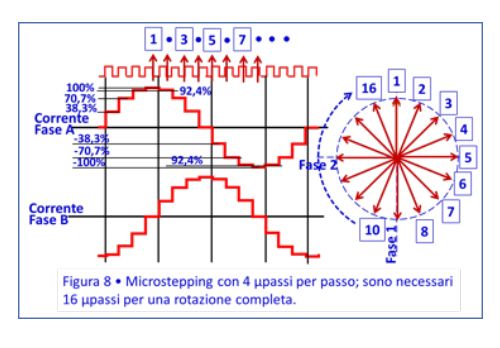
In questa figura è facile vedere come le due forme d’onda che pilotano le due fasi approssimino in modo preciso due sinusoidi sfasate di 90°. Infatti un numero infinito di µpassi trasforma il motore stepper in un motore sincrono a magneti permanenti alimentato in AC con la velocità di rotazione dipendente dalla frequenza dell’alimentatore AC. La posizione del rotore sarà in ritardo rispetto al campo magnetico rotante per un ammontare tale che porti la coppia generata da questo sfasamento ad essere uguale alla coppia resistente.
Quello in AC e un possibile sistema di pilotaggio ma, ovviamente, con la perdita della relazione tra numero di passi eseguito e posizione raggiunta facendo nascere la necessità di un sensore di posizione che consenta all’unità di pilotaggio di capire il posizionamento del rotore con un aumento significativo dell’elettronica.
Diversi produttori di circuiti integrati offrono dei componenti in grado di pilotare i motori passo passo secondo la tecnica del microstepping e quindi in grado di fornire delle correnti come quelle delineate in figura 8. Il numero di µpassi/passo è tipicamente programmabile nei valori di 1 (full step), 2 (half step), 4, 8, (ma anche fino a 256).
I vantaggi offerti dal microstepping sono sostanzialmente due, aumentare la risoluzione, e quindi la precisione di piazzamento, e ridurre il rumore del motore avendo una velocità di rotazione più regolare.
A questo punto è possibile immaginare di poter portare la risoluzione a livelli estremi. Se prendiamo per esempio un classico stepper motor con risoluzione di 1,8°, ovvero 200 passi/giro, e lo pilotassimo con un driver capace di 256 µpassi potremmo pensare di arrivare ad una risoluzione di 200 x 256 = 51.200 µpassi/giro ovvero una risoluzione angolare di 0,007 gradi.
Ma non è così semplice! La coppia che nasce dallo spostamento del campo magnetico di un µpasso è decisamente inferiore rispetto alla coppia che nasce muovendo il campo magnetico di un passo. Il valore di questa coppia che nasce dall’aver avanzato di un µpasso il campo magnetico – detta coppia incrementale – è ottenibile con la formula:
Dove:
TINC = coppia incrementale,
THFS =coppia statica,
µPFS = numero di µpassi/full step.
Nella tabella 1 seguente sono riportati i valori della coppia incrementale al variare del numero di µpassi/passo. La tabella mette in evidenza la rapidissima riduzione del suo valore al crescere del numero di µpassi.
Tabella 1 • Coppia incrementale per µpasso
| µpassi/full step | % della coppia statica/µpasso |
| 1 | 100% |
| 2 | 70,7% |
| 4 | 38,3% |
| 8 | 19,5% |
| 16 | 9,8% |
| 32 | 4,9% |
| 64 | 2,45% |
Per esempio, se su un motore con una coppia statica di 0,35 Nm viene pilotato a 64 µpassi la coppia incrementale sarebbe pari al 4,9% di 0,35 = 0,01715 Nm.
Se la coppia resistente sull’asse del motore fosse di 0,1 Nm l’asse del rotore non si muoverebbe e sarebbe necessario per il sistema di pilotaggio arrivare ad accumulare 6 µpassi (0,1 / 0,01715 = 5,83) per avere una coppia sufficiente a superare la coppia resistente e vedere l’asse iniziare a muoversi.
Un altro inconveniente del microstepping è legato alla moltiplicazione delle frequenze operative necessarie per ottenere velocità di rotazione elevate. Per esempio usando 128 µpassi/full step in un motore con risoluzione propria di 200 passi sono necessari un totale di 200 x 128 = 25600 µpassi per completare una rotazione. Se si volesse raggiungere una velocità di rotazione di 6000 giri/m (100giri/s) la sequenza con cui si devono scandire i µpassi dovrebbe essere di 2,56 Mhz (25.600 x 100 = 2.560.000 Hz).
Tipologie, strutture, funzionamento e caratteristiche dei motori passo passo
Esistono tre tipi di motori passo passo che si distinguono soprattutto dalla struttura con cui è realizzato il rotore:
- A magneti permanenti;
- A riluttanza variabile;
- Ibridi.
A magneti permanenti (MP)
Sono costituiti da un rotore la cui circonferenza esterna è popolata di magneti permanenti di polarità opposte affiancate, e con direzione del flusso magnetico radiale, che si sviluppano in parallelo all’asse del rotore. Lo statore porta gli avvolgimenti che vengono pilotati in sequenza per trascinare il rotore.

Il motore in questa figura ha solamente due avvolgimenti e presenta 20 poli in ognuna delle due fasi. Un polo ogni 360°/20 = 18° che rappresenta l’angolo di passo. Ogni avvolgimento di fase è contornato da una armatura in acciaio dolce a forma di ciambella – la porzione azzurra di figura 9 – che, sull’anello interno, presenta 20 poli di statore (vedi figura) con la stessa direzione dell’asse del motore.
Questi poli di statore hanno forma di artiglio (da qui anche il nome di ‘claw stepper’) e grazie alla loro forma rastremata tendono a concentrare il flusso magnetico nella parte più stretta dell’artiglio. Ogni artiglio, o dente, quando è parte della fase attiva mostra un polo magnetico, alternandosi con il polo opposto di quello adiacente. Questa alternanza di denti sud-nord attrae il magnete permanente del rotore. Il secondo statore, meccanicamente solidale con il primo, ha la stessa struttura ma sfasata, rispetto al primo, di mezzo angolo di passo ovvero di nove gradi. Se guardiamo la parte superiore del disegno in figura 9, vediamo rappresentata, in forma lineare, la sequenza dei poli di statore che, con la fase A attiva, è allineata con il rotore. Se a questo punto viene disattivata la fase A e viene attivata la fase B il rotore ruota di mezzo passo: 9°. Spegnendo la fase B e riattivando la A il rotore avanzerà ancora di mezzo passo e così via. Se si cambia il verso della corrente nei due avvolgimenti di statore si ottiene la rotazione del rotore in direzione opposta.
In sintesi:
- Le dimensioni, condizionate dal rotore; possono essere contenute.
- Gli angoli di passo sono generalmente piuttosto ampi.
- La presenza dei magneti permanenti sul rotore fa sì che questi motori abbiano una coppia residua (in assenza di eccitazione).
- La velocità raggiungibile è piuttosto limitata.
A riluttanza variabile (RV)
Questi motori sono caratterizzati dal fatto che non hanno magneti permanenti nel rotore né nello statore e la loro struttura, vedi figura 10 che rappresenta uno stepper a RV a tre fasi, è tra le più semplici in assoluto.

Lo statore è realizzato con lamierini stampati di acciaio al silicio con un numero pari o dispari di poli di statore (tipicamente in numero pari). Ogni polo di statore porta un avvolgimento di eccitazione. Nel caso in cui i poli siano in numero pari normalmente gli avvolgimenti dei poli contrapposti sono connessi in serie così che il campo magnetico venga rafforzato e la combinazione dei due costituisce una fase del motore.
Anche il rotore è formato da lamierini stampati di acciao al silicio che proiettano verso l’esterno dei denti, o poli, che però non portano avvolgimenti. Il numero di questi poli deve essere diverso dal numero di poli di statore per avere la capacità di avviamento e la rotazione in entrambe le direzioni.
Se si conosce il numero di poli dello statore (NS) e il numero di denti del rotore (NR), l’angolo di passo si può calcolare con la formula seguente:
qP = 360° x (NS – NR)/NS x NR
Nel caso di figura 10 NS = 6, NR = 4 per cui qP = 360° x 2/24 = 30°.
Quindi la risoluzione angolare può essere incrementata aumentando il numero di poli di statore.
Così come la resistenza determina il flusso della corrente in un circuito così la riluttanza determina la quantità di flusso magnetico. In uno stepper a RV il rotore è forzato ad assumere la posizione che minimizza la riluttanza tra i poli di statore contrapposti.
Per aumentare la risoluzione angolare esistono versioni dette multi-stack che possono essere viste come diversi motori a RV aventi lo stesso asse. La configurazione più diffusa vede tre unità che però possono raggiungere anche il numero di sette. Detto m il numero di unità ogni statore è sfasato di 360°/m rispetto a quello adiacente. Ma è equivalente sfasare i poli di rotore dello stesso valore e mantenere allineati i poli di statore
Un vantaggio offerto dagli stepper a RV è il costo relativamente contenuto che però è spesso annullato dai bassi livelli di coppia sviluppata.
In sintesi:
- Non dovendo incorporare magneti il rotore può essere di piccolo diametro che può conferire allo stepper una dimensione contenuta.
- A una ridotta dimensione del rotore corrisponde un basso momento di inerzia che consente una dinamica elevata: una buona coppia alla partenza, alte accelerazioni e buona velocità massima.
- L’angolo di passo è piuttosto ampio.
- La ridotta dimensione del rotore riduce anche la dimensione dello statore che non può ospitare un numero elevato di poli.
- Quando le fasi del motore non sono attivate il rotore è pressoché libero di ruotare.
- Sono rumorosi indipendentemente dal tipo di pilotaggio.
Motori ibridi

Per cercare di unire gli aspetti positivi degli stepper a magneti permanenti e quelli a riluttanza variabile sono nate le versioni definite ibride che hanno una struttura molto più complessa delle due versioni precedenti. Il disegno di figura 11 mostra lo spaccato di un tipico stepper ibrido ed alcuni dettagli dei suoi componenti.
La prima cosa da notare è che il rotore ha nel suo asse un magnete permanente con orientamento magnetico N-S coincidente con l’asse del rotore stesso. Su ciascuno dei poli del magnete permanente è collocata una struttura dentata – coppetta dentata anteriore e coppetta dentata posteriore – separate tra loro e sfasate angolarmente di mezzo passo di dentatura.

Il numero di denti di queste porta al calcolo del numero di passi dello stepper: per portare il dente B del rotore di figura 12 nella posizione A (rotazione di un angolo pari a 2π/NR) si alimentano in sequenza le m fasi del motore, e quindi il motore esegue m passi. In una rotazione completa tutti gli NR denti di rotore passeranno davanti al medesimo polo di statore e quindi il numero di passi per giro può essere anche espresso come Np= m x NR. 50 è un valore tipico di denti delle due coppette di rotore che in un motore a quattro fasi porta a un numero di passi pari a 4 x 50 = 200 (angolo di passo di 360°/200 = 1,8°).
Se si vuole una risoluzione elevata, ovvero piccolo angolo di passo, ma con un limitato numero di fasi “m”, dato che NP = m x NR, bisogna aumentare NR e quindi anche il numero dei denti di statore NS (altrimenti si hanno pochi denti che si “affacciano” e quindi poca coppia). Poiché il n° di denti per fase è NS/m, per limitare il n° di bobine per fase e quindi quello complessivo, piuttosto che fare tanti poli di statore piccini piccini, si realizzano dei poli di statore più larghi, a loro volta suddivisi in più “dentini” aventi un passo di dentatura pari a quello di rotore 2π/NR.

Per garantire un passo regolare, i poli di fasi consecutive devono essere sfasati di un angolo 2π/NS=q2π/NR + 2π/mNR = (2π/NR)x((1/m)+q) con q=0,1,2, … dove q rappresenta il n° massimo di dentini che può contenere ciascuno degli Ns poli di statore e dove, ora, con NS, si intende il n° di poli “grossi” e non dei dentini (il cui numero è multiplo di NS) (vedi figura 13).
Principio di funzionamento

Per cercare di rendere le cose più facilmente comprensibili facciamo riferimento alla struttura schematica riportata in figura 14. In questa configurazione abbiamo m=2, NR=15, NS=4, NP=m∙NR= 2∙15 =30 passi/giro; angolo di passo = 12°.
Il rotore da 15 denti ha, come già detto, una sezione sul polo sud del magnete permanente (la parte blu di figura) e l’altra porzione sul lato nord (parte rossa) che sono sfasate di mezzo passo. Grazie a questo offset il rotore ha effettivamente 30 poli magnetici interlacciati di polarità opposta. Questo stesso offset consente di avere una rotazione di 1/30 di angolo giro all’inversione della polarità di una fase. I denti di statore dei 4 poli corrispondono ai 15 denti di rotore ad esclusione dei denti che si collocano negli spazi tra gli statori. Quindi un polo del rotore, per esempio quello sud, si può allineare con lo statore in 15 posizioni distinte. Ma i denti del rotore sul polo sud sono sfasati di mezzo passo rispetto a quelli del rotore sul polo opposto, di conseguenza il rotore si può allineare con lo statore in 30 posizioni distinte
Se guardiamo ora ai poli maggiori dello statore questi sono relativi alle fasi φ1 e φ2 . Le fasi di statore sono sfasate di ¼ di dente, come si può capire dalla figura 14, il risultato è che, quando le fasi sono energizzate alternativamente, il rotore si muove a passi di ¼ di dente. In altre parole il rotore, per compiere una rivoluzione completa, deve avanzare per 2 x 30 = 60 passi da ¼.
In figura 15 e nelle note seguenti si cerca di illustrare le rotazioni di ¼ di dente prodotte dalla attivazione successiva delle due fasi del motore.
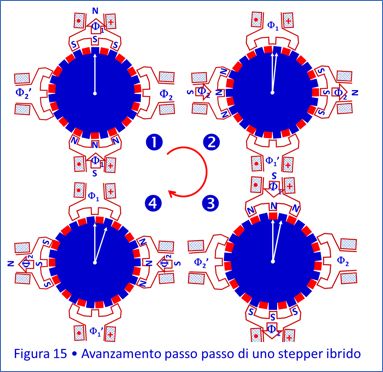
- φ1=on, φ-2=off. Allineamento alto/basso: φ1 statore-N; rotore-alto-S, φ1’ statore-S; rotore-basso-N. Posizione di partenza, rotazione = 0.
- φ1=off, φ2=on. Allineamento destra/sinistra: φ2 statore-N a destra; rotore-destro-S; φ2’ statore-S; rotore-sinistra-N. Rotazione 1/4, rotazione totale 1/4.
- φ1=on (inversa), φ2=off. Allineamento basso/alto: φ1 statore-S; rotore-basso-N, φ1’ statore-N; rotore-alto-S. Rotazione di 1/4 dalla posizione precedente. Rotazione totale dalla posizione di partenza 1/2.
- φ1=off, φ2=on (inversa). Allineamento sinistra/destra: φ2 statore-N a sinistra; rotore-destra-S; φ2’ statore-N; rotore-sinistra-S. Rotazione di 1/4 dalla posizione precedente. Rotazione totale dalla posizione di partenza 3/4.
- Non in figura: φ1=on, φ2=off (la stessa della posizione ). Allineamento alto/basso. Rotazione totale di 1 dente.
In sintesi:
- Riescono a raggiungere angoli di passo molto contenuti senza dover usare un elevato numero di fasi.
- Ottime prestazioni dinamiche.
- Coppia ottima prodotta grazie alla combinazione di magnetizzazione e di riluttanza
Tabella 1 • Confronto tra i diversi tipi di stepper
| Parametro | Magneti Permanenti | Riluttanza Variabile | Ibridi |
| Velocità | bassa | alta | molto alta |
| Coppia residua | elevata | minima (nulla) | media |
| Coppia sincrona | bassa | media | elevata |
| Inerzia rotore | alta | bassa | bassa |
| n°passi/giro | basso | alto | alto |
| Precisione angolare | bassa | media | elevata |
| Angoli di Passo più diffusi | 7,5° 9° 15° 18° | 1,8° 7,5° 15° | 0,9° 1,8° 3,6° |
| Efficienza | buona | bassa | ottima |
| Prest. dinamiche (coppia/inerzia) | buone | ridotte | elevate |
| Rumorosità | non eccessiva | elevata | ridotta |
| Pilotaggio | full, half e µstep | Tipicamente solo full step | full, half e µstep |
| Complessità costruttiva (costo ) | medio-alta(1) | bassa | elevata |



