Introduzione
I circuiti elettronici richiedono un numero sempre maggiore di alimentazioni, con assorbimenti che variano da pochi milliampere a qualche decina o centinaia di Ampere, come avviene nei dispositivi di potenza e nel settore automotive. La scelta dell’alimentatore più adatto a una specifica applicazione riveste quindi un’importanza fondamentale per soddisfare anche i requisiti più stringenti di efficienza, occupazione di spazio sul PCB, accuratezza nella regolazione della tensione di uscita e basso costo. A seconda della particolare applicazione, i progettisti possono scegliere tra due possibili soluzioni: il regolatore di tipo lineare oppure l’alimentatore switching (noto anche con il termine SMPS, acronimo di Switching Mode Power Supply). In questo articolo verrà analizzata la prima soluzione che, nonostante sia stata introdotta per la prima volta negli anni ’60, è tuttora valida e applicabile a numerosi contesti.
I regolatori lineari
Supponiamo di dover alimentare un dispositivo elettronico (ad esempio un comune microcontrollore) che richieda una tensione stabilizzata di 3,3V, ma di disporre soltanto di una sorgente di alimentazione a 5V. L’approccio più semplice e immediato potrebbe essere quello di utilizzare il classico partitore di tensione: con una coppia di resistenze di opportuno valore è possibile ridurre la tensione iniziale di 5V ottenendo una tensione di uscita pari a 3,3V. Nonostante sia estremamente semplice, questa soluzione si dimostra, nella pratica, completamente inefficace. Anzitutto, la tensione in uscita non sarà perfettamente regolata, aumentando o diminuendo il proprio valore a seconda delle condizioni del carico. Inoltre, nel caso di più dispositivi collegati sulla stessa linea di alimentazione, avremo anche delle variazioni a livello di impedenza. Ne consegue che un partitore di tensione non è di per sé sufficiente, ma occorre un regolatore che, operando in anello chiuso, sia in grado di mantenere il più possibile costante la tensione di uscita al variare delle condizioni del carico. In Figura 1 possiamo osservare lo schema di principio di un regolatore di tensione lineare.
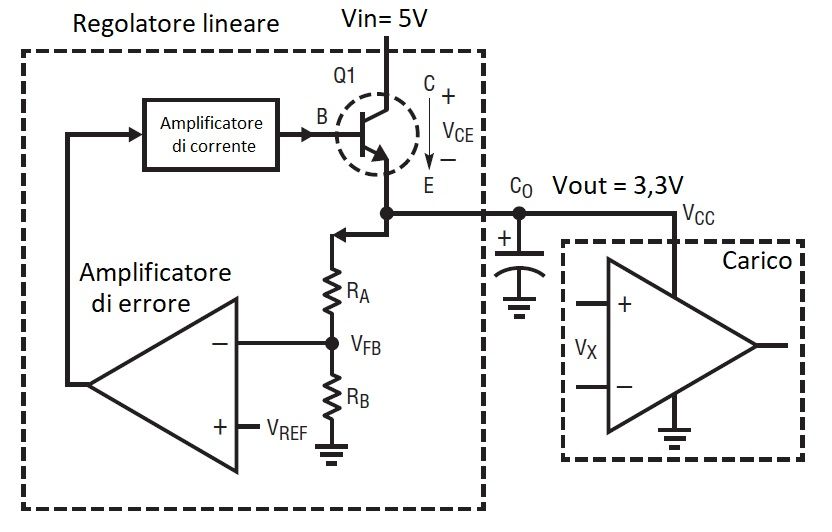
Il transistor Q1, che può essere indifferentemente un BJT oppure un FET, opera sempre nella zona lineare (da cui il nome del regolatore), realizzando di fatto una resistenza variabile in serie con il carico. L’amplificatore di errore rileva la tensione di uscita continua VFB tramite la coppia di resistenze RA e RB e la confronta con la tensione di riferimento VREF. Il segnale di uscita dell’amplificatore di errore pilota poi la base del transistor Q1 tramite un amplificatore di corrente. Se ora la tensione in ingresso diminuisce, oppure la corrente assorbita dal carico aumenta, la tensione di uscita del regolatore si abbassa e con essa la tensione VFB. Come effetto di ciò, l’amplificatore di errore prima e l’amplificatore di corrente poi inietteranno una corrente maggiore nella base del transistor Q1, riducendo la caduta di tensione VCE e riportando il valore di VFB uguale a VREF. Viceversa, se la tensione di uscita aumenta, il circuito di retroazione negativa incrementa VCE in modo tale da assicurarsi che la tensione di uscita sia sempre regolata al valore di 3,3V. In altre parole, un regolatore lineare è un circuito in grado di assorbire ogni possibile variazione della tensione di uscita VOUT, mantenendola stabile al variare delle condizioni del carico e delle oscillazioni della tensione in ingresso.

In virtù della loro estrema semplicità, i regolatori lineari hanno dominato per lungo tempo il mercato degli alimentatori di tensione, almeno fino all’introduzione della tecnologia switching, più efficiente dal punto di vista energetico. Ancora oggi, tuttavia, esistono numerose applicazioni in cui i regolatori lineari offrono prestazioni eccellenti, soprattutto nei dispositivi di bassa o media potenza, soprattutto se alimentati a batteria (un esempio sono i dispositivi indossabili).
Efficienza dei regolatori lineari
Poiché il transistor Q1 opera sempre nella zona lineare, il regolatore deve dissipare un’elevata quantità di potenza, un fattore che può compromettere l’efficienza energetica del circuito stesso. La dissipazione di potenza, PLOSS, può essere calcolata in base alla seguente formula:
PLOSS = (Vin – Vout) x Iout
Dove Iout è la corrente assorbita dal carico.
L’efficienza η può invece essere calcolata nel modo seguente:
η = POUTPUT / (POUTPUT + PLOSS) = (Vout x Iout) / ((Vout x Iout) + (Vin – Vout) x Iout) = Vout / Vin
Nell’esempio di Figura 1, dove Vin=5V e Vout=3,3V, l’efficienza del regolatore è pari a 66%. Ciò significa che 34% della potenza fornita in ingresso al regolatore viene dissipata (sprecata) sotto forma di calore. Il transistor Q1 deve quindi essere dimensionato per sopportare l’ingente quantità di calore prodotto e deve essere raffreddato tramite opportuni radiatori o tecniche di gestione del calore implementate direttamente a livello di PCB. Si noti come l’efficienza sia tanto più bassa quanto maggiore è la differenza tra la tensione di uscita e quella di ingresso del regolatore. In Figura 2 è mostrato l’andamento dell’efficienza di un regolatore lineare al variare del rapporto Vout/Vin. Dall’esame del grafico, di tipo lineare, si evince comunque come un regolatore lineare possa raggiungere un livello di efficienza molto elevato ogni volta che Vout si avvicina molto a Vin.


I regolatori lineari di questo tipo sono detti LDO (Low DropOut), in quanto producono una tensione di uscita regolata con caduta di tensione minima (dell’ordine di alcune decine o centinaia di mV) rispetto alla tensione in ingresso. Indipendentemente dal tipo, un regolatore lineare genera sempre una tensione di uscita inferiore alla tensione in ingresso ed è quindi adatto ad alimentatori o convertitori step-down. Qualora fosse necessario innalzare la tensione in ingresso, ottenendo una tensione di uscita di valore superiore, occorrerebbe necessariamente utilizzare un regolatore switching (step-up) anziché uno lineare.
Applicazioni dei regolatori lineari
Esistono numerose applicazioni in cui i regolatori lineari e gli LDO offrono delle prestazioni pari o superiori a quelle di un alimentatore switching, in particolare:
- alimentatori semplici e a basso costo: i regolatori lineari sono estremamente semplici da utilizzare e richiedono pochissimi componenti esterni. Tipiche applicazioni includono i dispositivi di bassa potenza con correnti di uscita ridotte e dissipazione del calore molto contenuta. Un ulteriore vantaggio di questa soluzione è quello di non richiedere un induttore esterno;
- applicazioni con basso rumore: nei dispositivi sensibili alla presenza di rumore, come le interfacce di comunicazione e i transceiver radio, è fondamentale contenere al minimo il rumore prodotto dall’alimentatore. I regolatori lineari, utilizzando il transistor nella zona lineare anziché in commutazione, non generano pericolose interferenze elettromagnetiche e presentano un ripple di tensione molto contenuto (dell’ordine dei µVRMS, rispetto ai mVRMS dei migliori alimentatori switching);
- applicazioni che richiedono una rapida risposta al transitorio: poiché il loop di retroazione del regolatore lineare è realizzato internamente, non è necessaria alcuna compensazione esterna e la risposta ai transitori è molto più veloce rispetto a un SMPS. Ciò significa che un regolatore lineare è in grado di eseguire il loop di regolazione della tensione di uscita in un tempo pressoché finito e deterministico;
- applicazioni a basso dropout: nelle applicazioni in cui la differenza tra la tensione di uscita e quella di ingresso è molto piccola, un LDO può dimostrarsi più efficiente di un SMPS. Oggi sono disponibili in commercio dei particolari tipi di LDO detti VLDO (Very Low DropOut) caratterizzati da una tensione di dropout molto ridotta, compresa tra 20mV e 90mV. Nelle applicazioni alimentate a batteria, in cui l’efficienza energetica assume un ruolo fondamentale, un regolatore LDO può essere preferibile a un alimentatore switching.
Conclusioni
I regolatori lineari e gli LDO rappresentano una soluzione per l’alimentazione dei dispositivi elettronici semplice, a basso costo, basso rumore e rapida risposta ai transitori. Se la tensione di uscita Vout è molto prossima alla tensione di ingresso Vin, un regolatore LDO può rivelarsi più efficiente di un regolatore switching, offrendo anche una migliore compatibilità elettromagnetica. I regolatori lineari sono attualmente utilizzati in molteplici applicazioni step-down con potenze fino a circa 10W.